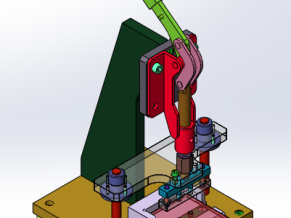
轴测图
目的动作 用磁铁吸附工件进行搬送,从磁铁开始分开降落到发射装置 环境操作性 用气缸前端上装的刀叉状的卡抓,夹住工件,使其从磁铁上分离 葫芦型以及圆筒型的工件用刀叉状夹的卡爪抓取 工件用多轴机器人搬送
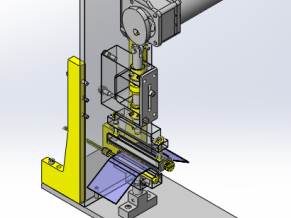
侧视图
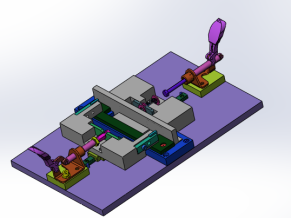
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:











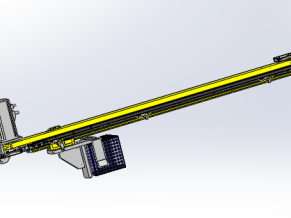










-提升-输送设备")




