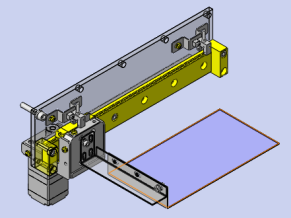
轴测图
目的动作 用单轴机器人使圆柱形状工件升降,利用气缸区分OKNG品 OK品、NG品的判别是通过追加其他的判别组件 环境操作性 OK品的区分设定为只有升降的工件搬送 NG品的区分设定为用气缸前端的引入支架回收 工件区分后,通过滑块上的滚动和自动落下搬送到下一个工序 需要调整滑槽倾斜和固定位置,引入侧工件导轨支架位置
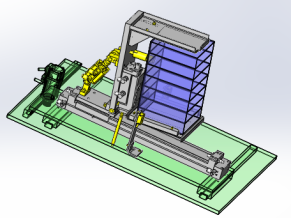
侧视图
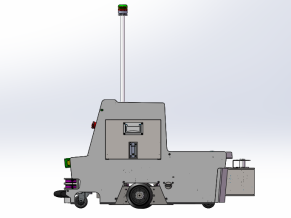
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: