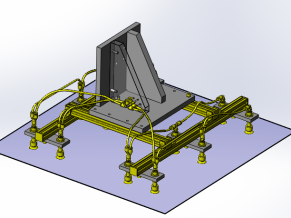
轴测图
目的动作 目的: 整理输送机上错乱的工件。 动作:工件到达搬运位置时使其停止,再通过两侧的臂进行中心定位。中心定位后松开臂,使工件通过。 环境操作性 用于工厂内的传送线
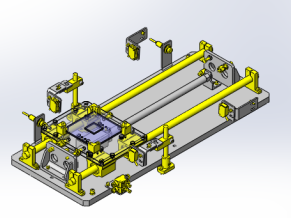
侧视图
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: