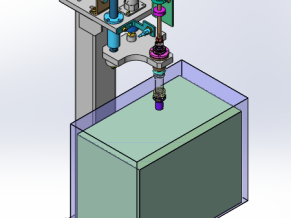
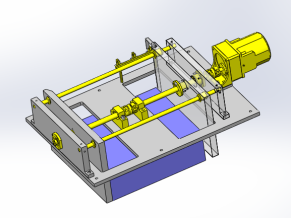
轴测图
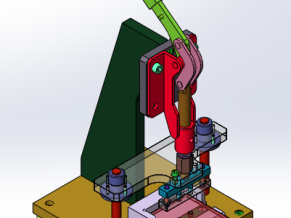
目的动作 通过聚氨酯成形轴承使工件靠边(校准),紧贴工件压块,进行定位。 通过带吸盘的机械手将工件固定到本装置上(粗略位置)。 为了确定工件位置而采用本机构。 采用作业频率较少的手动式,以确认抽样情况。 环境操作性 基于铝合金压纹手轮动作的手动机构。 (将旋转运动转换为直线运动)
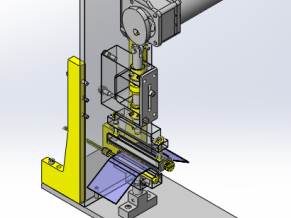
侧视图
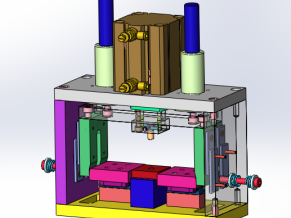
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:
























机构")
