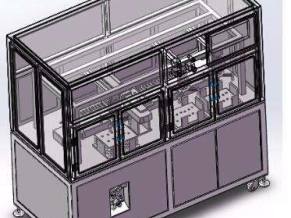
1 主视图
=双爪伺服搬送机构:通过松下伺服电机驱动,齿轮齿条和导轨的传动。精确定位搬送的位置。可以根据实际需要延长齿条和导轨的长度。Z轴是SMC电缸和SMC卡爪组合。便于调整抓取位置,对于多个机种的搬送工位,这套机构使用很方便。附带STEP格式。
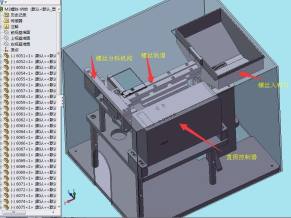
2 正视图
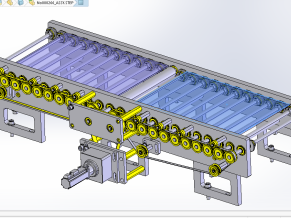
3局部图
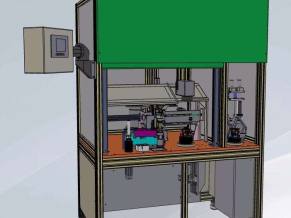
4 辅助视图
5.详细视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:

























")

