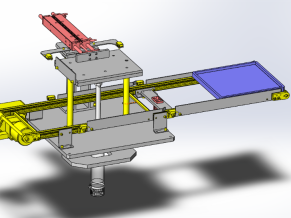
全视图
轨道式巡检机器人是运行于轨道上的巡检机器人,本体结构采用模块化的设计方式,具体结构包括驱动机构、导向机构、制动机构、电气防尘防水结构和其他辅助结构等。巡检机器人最主要的部分是驱动机构,这一部分采用左右两侧驱动轮夹紧轨道中间立板的形式,可以使机器人在坡面上平稳行进不打滑。 模型含有参数,可以编辑,欢迎下载。
侧视图
正视图
制动结构
模型树图
零件图
驱动轮轴工程图
工程图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: