装配
多轮机器人底盘设计模型一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。
全套图
三维
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:












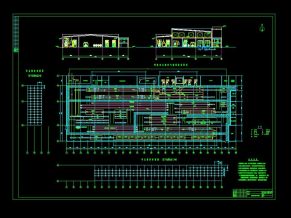




![[湖南]污水处理厂全套施工图纸](http://img.jixie5.com/d/file/2020/09/26/3d58181c620c5cec24bfd9c7feba9afa.jpg@!l)












