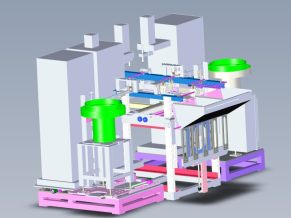
整体视图
该机械手臂由底座,肩部,肘部,腕部组成,具有6自由度,底座主要完成整体的水平平面转动,其余的几个关节共同完成平面内的移动和相应转动,图纸格式为stp,可拆解。
俯视图
鸟瞰图
仰视图
主视图
左视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: