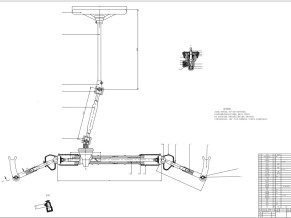
仿生垂直跳跃机器人salto,通过八连杆机构进行稳定跳跃,改变杆件参数可以该表跳跃的行程。该机器人为加州伯克利学校通过仿生夜猴跳跃而设计制作,该模型仅为该机器人的一代产品,通过摆杆进行pitch方向姿态调控。该模型通过salto中图片进行建模得到,尺寸参数与实际样机有点差距,但跳跃不成问题。
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:




















三维SW2018带参")








