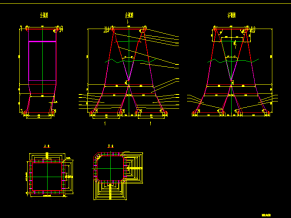
总图
本工作站采用双机器人双工位的焊接方式。主要包括弧焊机器人、电弧跟踪系统、系统集成控制柜、焊接电源、焊接工装夹具、放置架单元、外围防护网等组成。 主要用于皮带输送机驱动滚筒筒皮、中心轴及法兰盘的焊接;被焊工件最大尺寸范围:Φ800mm ×1750mm ;焊缝形式:环焊缝
俯视图
工件
机器人
主视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:






















")
")
")


")
")

")
