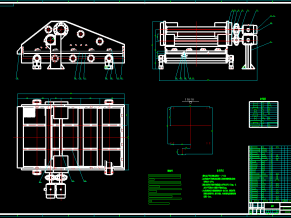
1-1-电池盒
"飞行器直流电源(DC+12V)提供动力,借助太阳能充电宝给电池充电以增加运动续航。
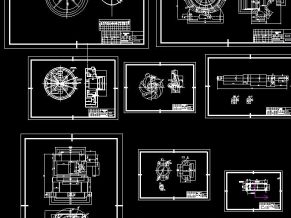
当机构处于飞行模式时,旋翼直接安装于直流调速电机的转子上并由其直接驱动,借助旋翼旋转时产生的升力,带起机构向上攀升飞行,再通过协同调节四个电动机的转速,来让机构完成相应的动作。
当机构处于爬行模式时,直流调速电动机通过齿轮的内、外啮合传动,将转矩和转速有序得传递给轮子,而轮子和地面间运动摩擦产生的相互作用力,来让机构完成相应的动作。
当机构处于游行模式时,运动传递路线与爬行模式时相同,但轮胎外部会安装上形状相同的桨叶,桨叶的末端内嵌于橡胶轮胎的内部,桨叶的另外一端则与水接触,当机构漂浮在水面上时,驱动带有桨叶的轮子便能使机构完成相应的动作。
驱动旋翼和轮子的电动机的转速由控制电路直接调控,为了让机构在处于不同运动模式下完成不同动作,以及不同模式、不同动作之间的完美切换,机构需同时具备软件消抖和硬件消抖的功能。
"

1-2-电池盒-爆炸图

2-1-太阳能充电宝

3-1-直流调速电机1

3-2-直流调速电机2

6-4-海路

4-1-传动路线

4-2-传动路线

4-3-传动路线

4-4-传动路线

5-1-逆时针旋转旋翼

5-1-顺时针旋转旋翼

5-2-陆路

5-2-水路

6-1-海路

6-2-海路

6-3-海路

6-5-海路

7-1-空路

7-2-空路

7-3-空路

7-4-空路

7-5-空路

8-1-陆路

8-2-陆路

8-3-陆路

8-4-陆路

8-5-陆路

9-1-摄像头

9-2-LED灯