

总成
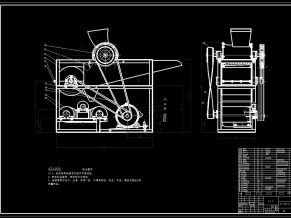
四旋翼飞行器的设计原理为:引擎固定于桨毂上方,驱动轴一段连接在引擎内部,驱动轴末端同轴固定一个锥形齿轮,此锥形齿轮与另外两个锥形齿轮相互啮合,由一根贯通的连杆与锥形齿轮固定,连杆的另一端与旋翼头部的零件连接,旋翼固定在旋翼头部下方的零件上。本设计中的四个旋翼呈中心对称,安装方法相同。
本设计的四旋翼飞行器的工作原理为:由固定于桨毂上方的引擎工作,先带动驱动轴转动,进而通过上述设计方案里的各种啮合零件的工作,最终驱动旋翼转动,使飞行器获得升力,能顺利飞向天空。

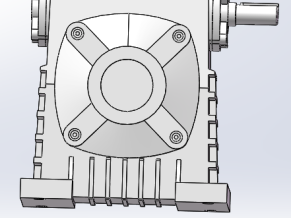
传动

动力系统

旋翼
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!








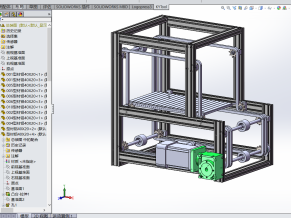












模型")


