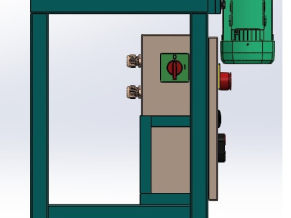
腰部旋转关节谐波减速器
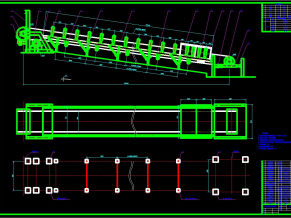
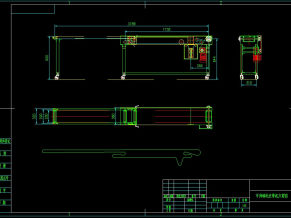
机器人系统结构总体方案设计:(1)根据各种传动方式之间的联系及特点,通过取长补短,主要考虑了结构紧凑简单等原则,确定了机器人的整体设计方案;(2)各个回转关节的驱动方式均采用电机加减速器的方式的传动设计,大臂的回转关节和大臂做成一体,大臂的截面形状采用等强度处理;
(3)在各个关节的结构设计中,充分考虑到附加载荷对电机轴的影响,回转关节轴的载荷通过固定在其两端的轴承把负载的附加载荷传递到轴承上,从而保护了电机和减速器;
。欢迎下载学习交流。

腰部旋转关节

手部手爪

气动机器手手部手爪结构