

总装图
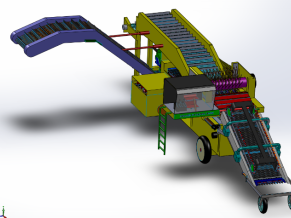
人类进入21世纪在科技、人文、经济等方面得到了前所未有的巨大发展。但是伴随着人类经济活动的进行,人类极大地改变了大自然的原貌导致水土流失、土地荒漠化、地震、海啸及强台风等极端自然灾害剧增。同时随着社会贫富两极化的加剧和宗教信仰的分歧,人为恐怖事件也日益威胁公民人身财产安全。面对这些自然界和人为的灾害,人类并没有消极逃避,而是积极预防和救助。但在各种复杂的灾害现场救援人员的短缺也日益显现,同时一些极端情况并不允许人员进行救助。因此研制针对灾难废墟现场的搜索与辅助救援的机器人的要求日益迫切。本文针对现实需求设计了一种具有高机动自越障能力的机器人平台,以求为减轻灾害给人们带来的损失。
本文针对这种现实需求,开展了废墟搜索与辅助救援机器人平台的设计。首先分析了机器人遇障情况和相应的力学原理,针对设计要求提出了能够适应障碍地形的凸四边形及平行四边形的悬架模型。然后对该悬架的重点部分――攀登机构四边形悬架进行了运动学分析,并对此模型采用了曲线逼近法参数优化。同时,本文选取了三星轮作为车轮,文中对三星轮的越障原理进行了详细的分析。根据小车性能要求,详细设计了小车的转向系统。在设计的过程中,作者使用UG NX7.0三维建模软件对设计进行了实体建模。通过实体建模排查设计中不合理的地方检查干涉,使设计更趋合理。最后对小车的越障性能做出了详细分析,经过验证表明小车设计达到设计要求。

联轴器

任务书

三星轮

说明书

行星轮轴

轴座

转向轴

转向轴座
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!





















钻杆检测机械部分设计(含CAD图纸)")
")

