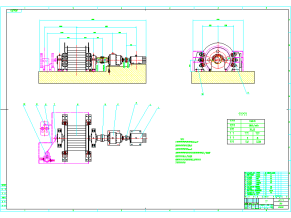
总装图A0-Model
通过对机械设计制造及其自动化专业四年所学的知识进行整合,对工业机械手的结构和功能进行论述和分析,设计了一种圆柱坐标式的上下料机械手。
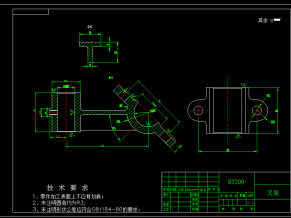
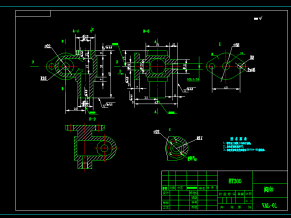
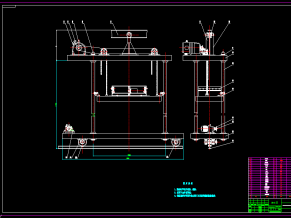
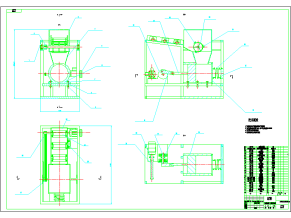
重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。具体进行了机械手的总体设计,腰座结构的设计,机械手手臂结构的设计并对其进行分析计算,机械手腕部的结构设计,手爪的结构设计并对其进行分析计算,机械手驱动系统的设计,同时对液压系统和控制系统进行了理论分析和计算。通过对机械手作业的工艺过程和控制要求的分析,对控制系统进程序设计,同时编写PLC控制程序及梯形图等,设计达到了设计的预期目标。

技术要求

接线与梯形图A0-Model

明细表

目录1

目录2

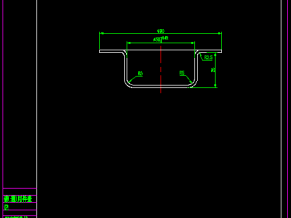
手臂原图-Model

状态转移图A2-Model