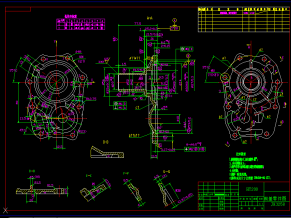
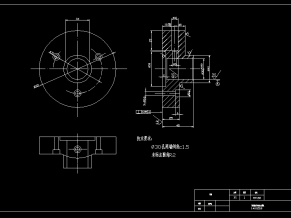
手腕、手部结构
摘要
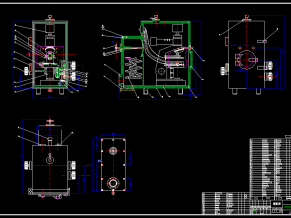
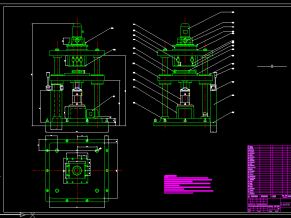
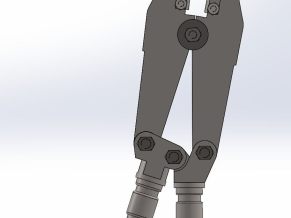
本次设计的程控通用机械手根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,其中机械手的驱动构方式采用液压驱动,坐标形式采用圆柱直角坐标,总共四个自由度,本课题设计为两个自由,为手臂的伸缩,手指的抓取;此程控通用机械手主要的动作采用液压系统;机械手的手臂伸缩采用伸缩油缸驱动;本设计主要对手部进行了设计和计算,手臂的后部采用了滚轮,这样可以承受较大的重物,还有一个特点是:可根据生产的需要改变机械手的动作程序。
关键词:机械手;手腕;手指;液压缸

电位器座

杠杆

杠杆支座

回转缸后盖

回转缸前盖

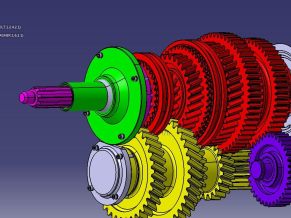
活塞

夹紧缸体

手臂的伸缩机构

手指

开题报告_doc_1

中期报告_doc_1