
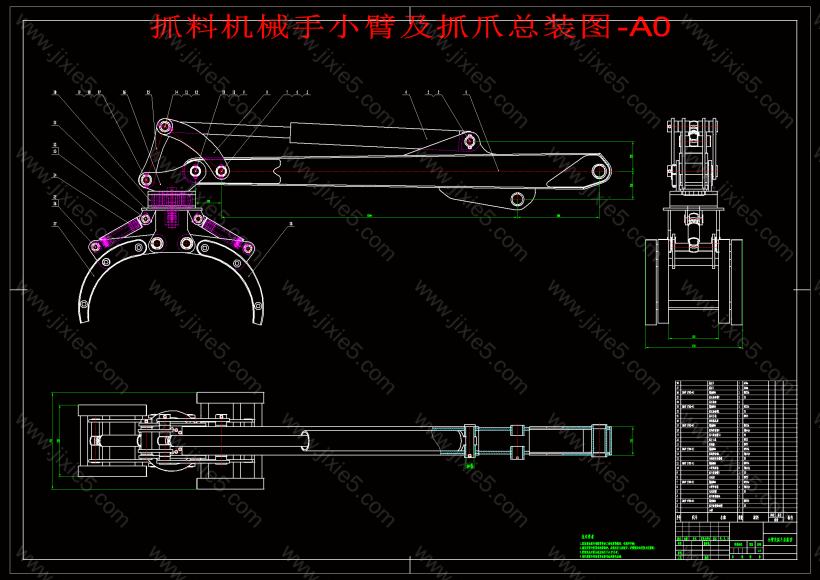
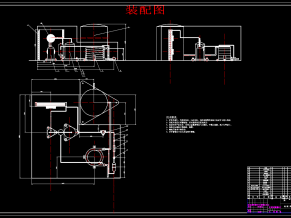
抓料机械手小臂及抓爪总装图-A0
所谓抓料机机械臂,就是将机械臂安装在一个固定立柱上,立柱及驾驶室部分可以360°旋转,机械臂可以随着立柱旋,通过机械臂末端的抓斗进行抓料作业。这种结构使机械臂拥有更大的操作性和动作空间,使它具有更广阔的应用前景。目前抓料机正向着人性化、小型化、多样化方向发展,其应用也越来越广泛,几乎渗透到所有领域。
抓料机主要由小臂、旋转机构、液压装置、抓斗等部分组成。本次设计主要是关于抓料机小臂及抓斗的设计,小臂及抓斗是直接完成抓取物料任务的装置,对其进行全面的通用性设计研究对推动国内抓料机发展具有十分重要的意义。
本设计本文介绍抓料机的小臂和抓抖部分研究意义、现状及发展。全面收集了国内外抓料机小臂及抓斗设计的资料,对抓料机的各种工况进行了分析,总结了抓料机小臂及抓斗的设计要求。分别对小臂、抓斗及链接机构进行了较为详细的设计,这其中就包括了各部分尺寸的计算及与选型。最后对小臂在一些特殊工况下进行了校核。
关键字:抓料机小臂抓斗设计
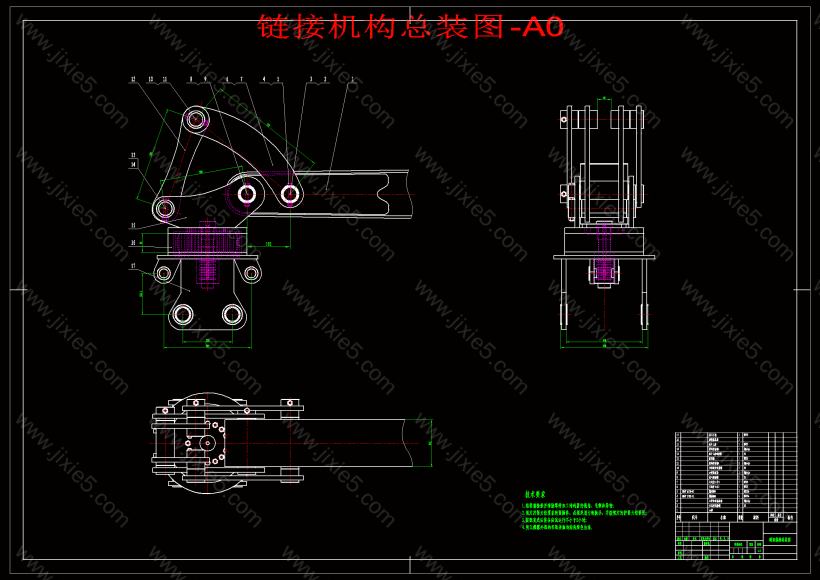
链接机构总装图-A0

短杆连接销-A3
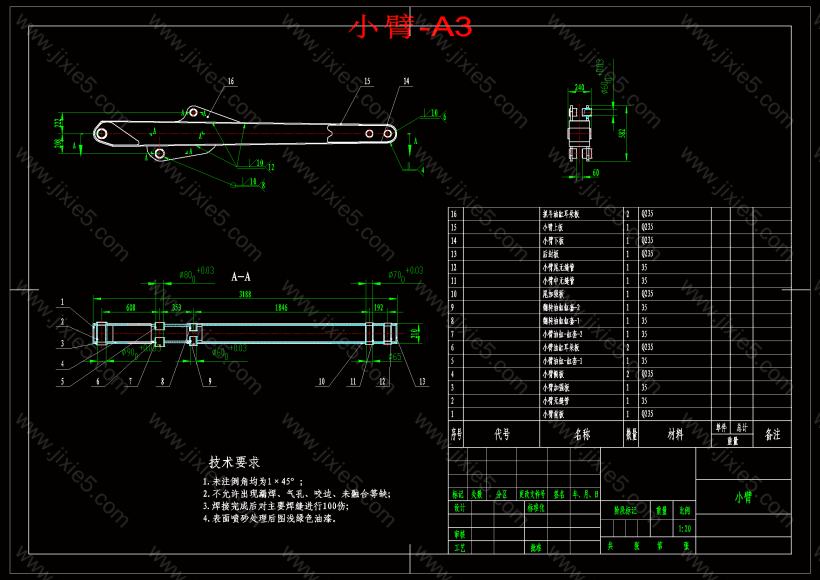
小臂-A3
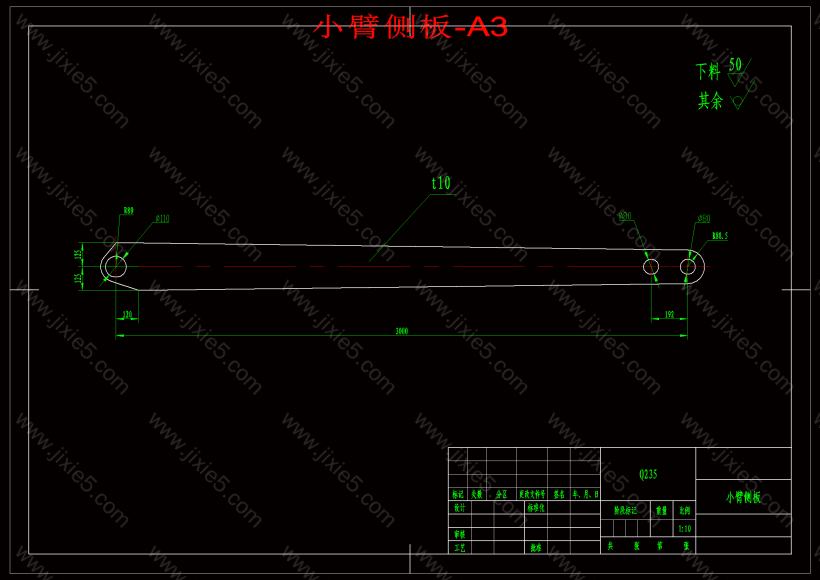
小臂侧板-A3
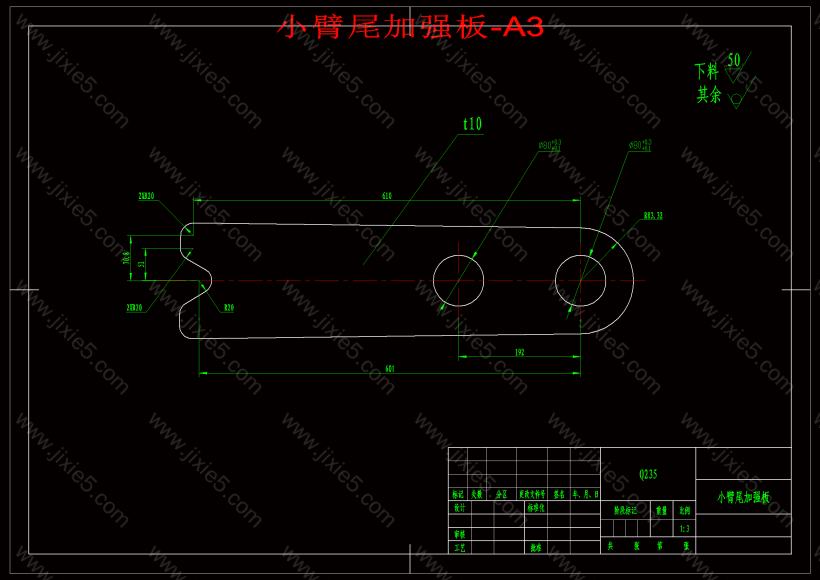
小臂尾加强板-A3
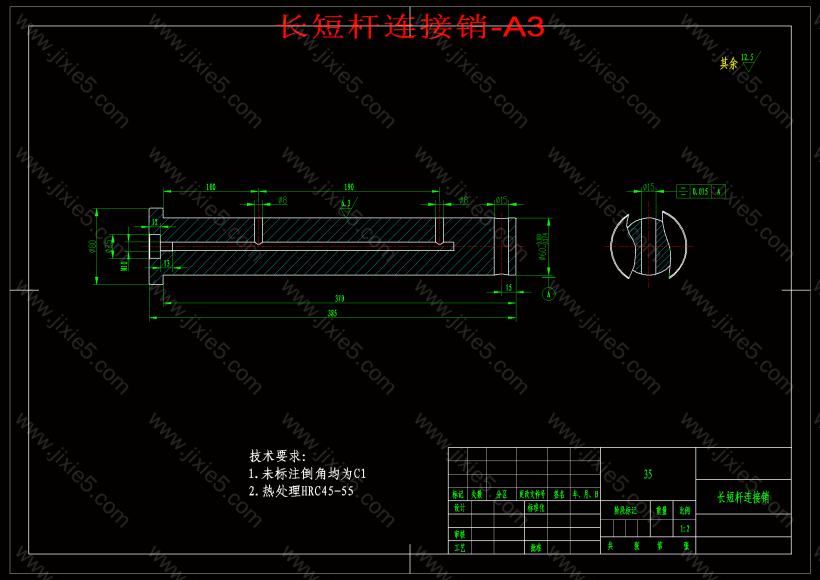
长短杆连接销-A3
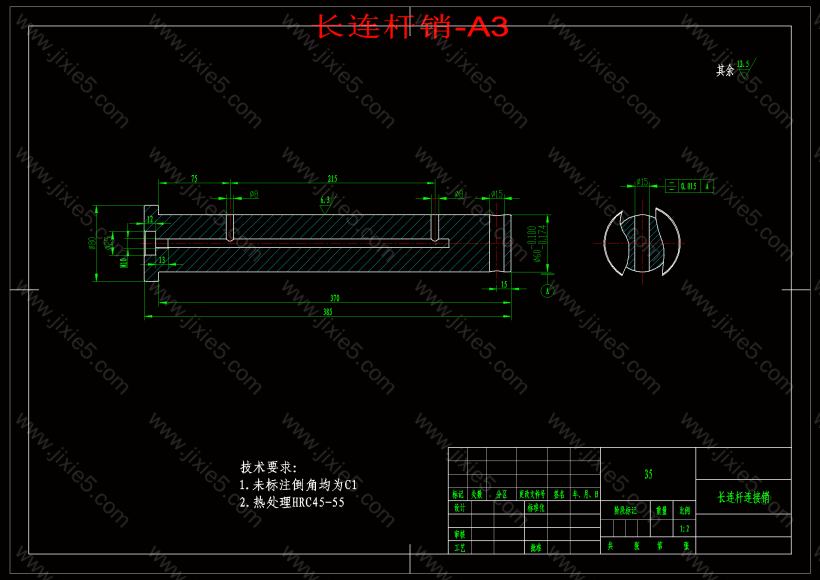
长连杆销-A3

爪斗长连杆(右)-A3
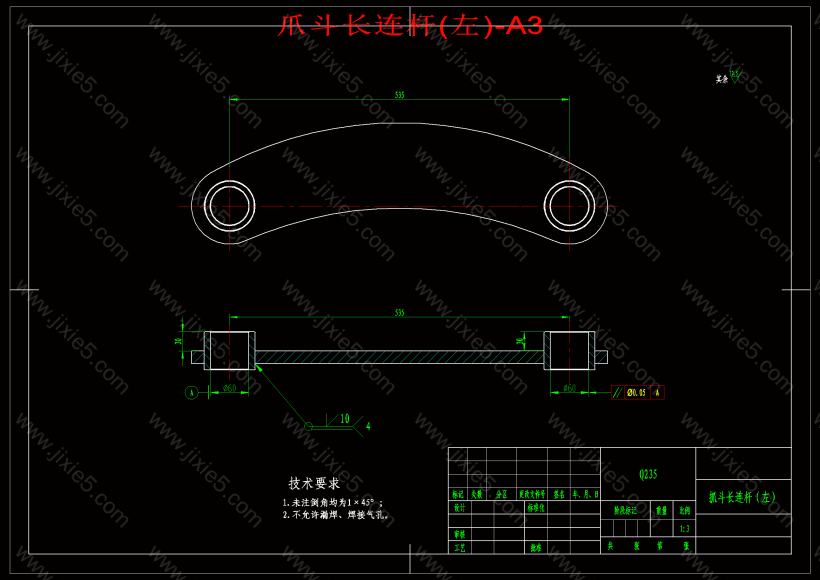
爪斗长连杆(左)-A3
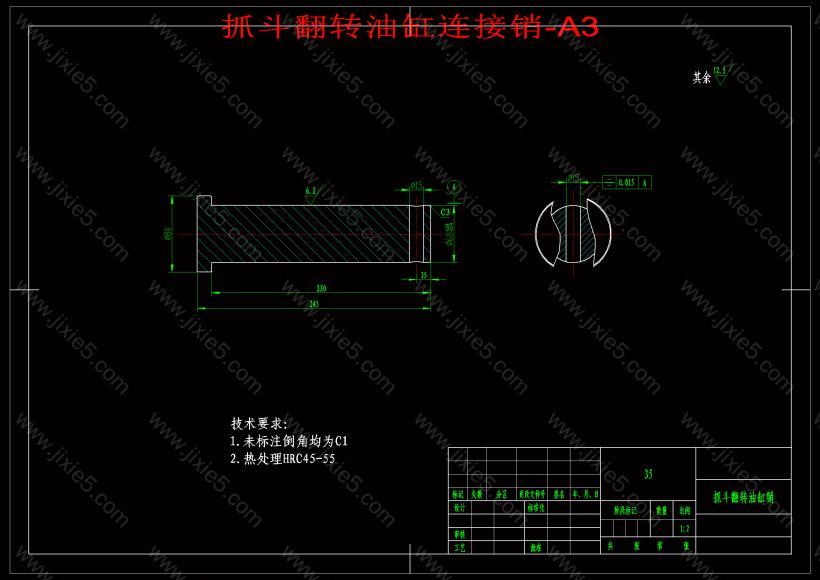
抓斗翻转油缸连接销-A3
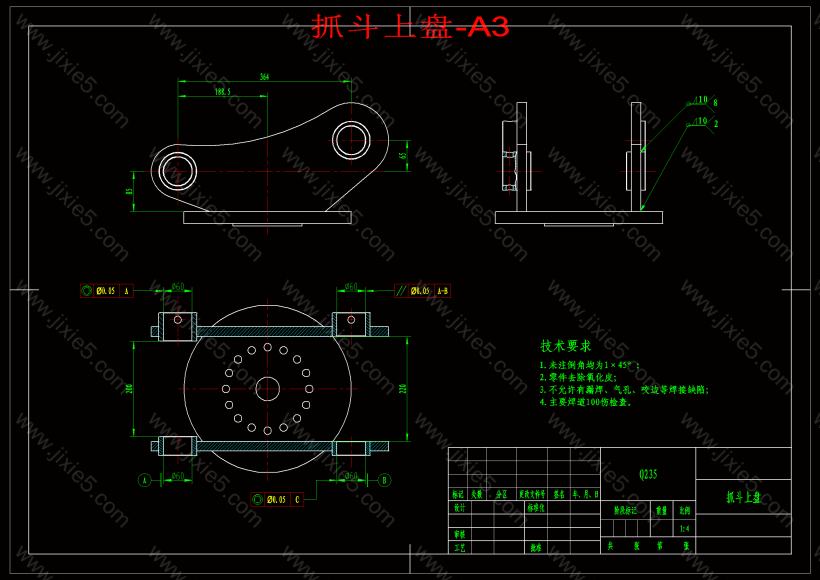
抓斗上盘-A3

抓斗油缸耳朵板-A3

抓爪1-A3
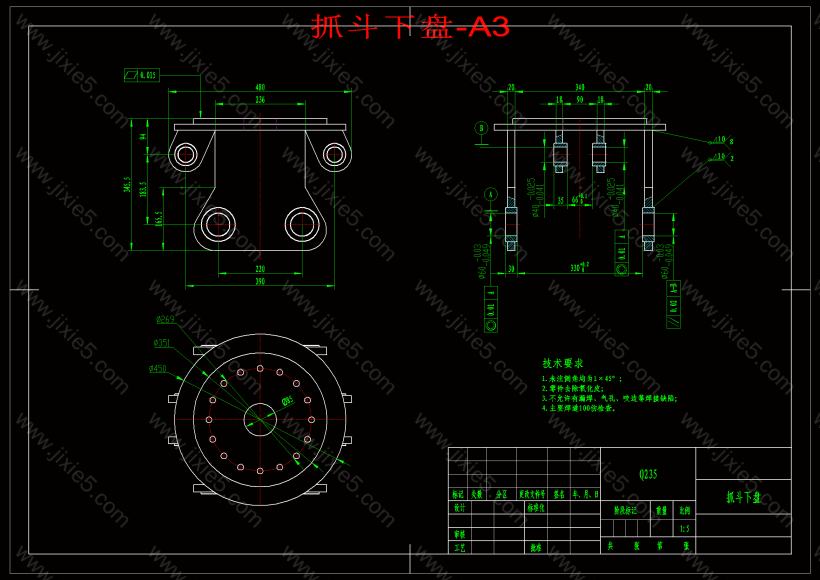
抓斗下盘-A3
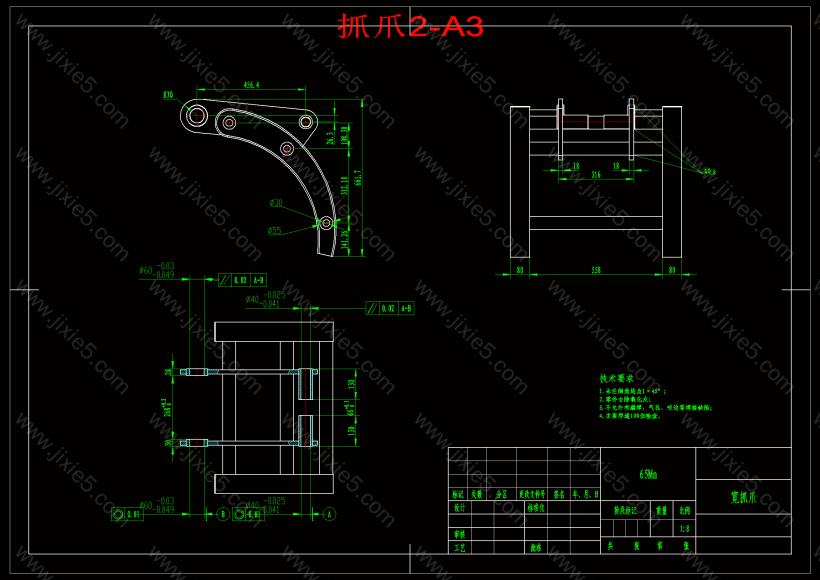
抓爪2-A3
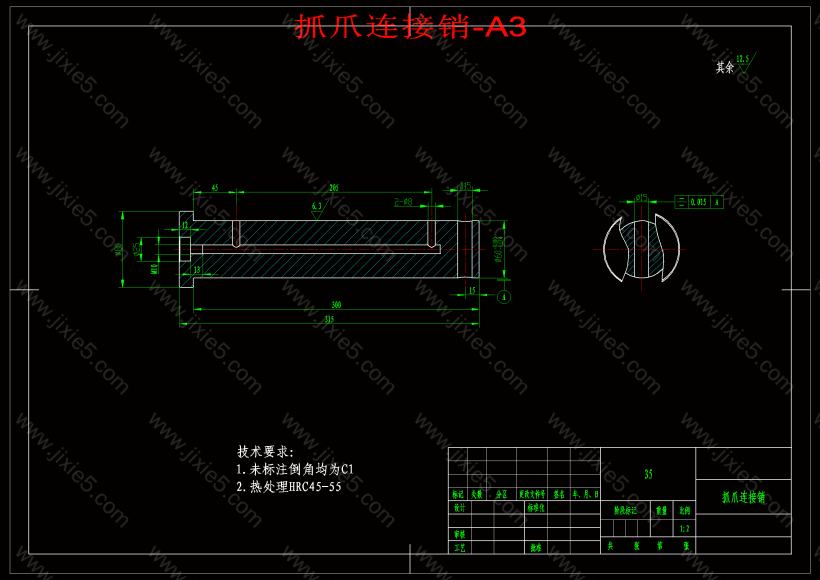
抓爪连接销-A3

















")
")

