

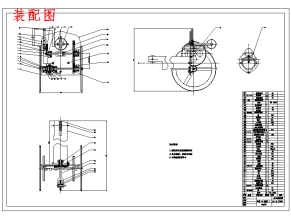
整体装配图A0
摘要
本文简要地介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和座标型式,各种驱动方式的特点,PLC控制的特点及国内外的发展状况。另外本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构和各部分的结构;设计了机械手的手腕结构,计算出了手臂伸缩、升降用液压缸的具体尺寸;设计了手臂伸缩、升降用液压缸和手臂回转用伺服减速机。设计出了机械手的液压系统,绘制了机械手液压系统工作原理图。利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作程序做出了相应的梯形图。
关键词:工业机器人,机械手,液压传动,可编程序控制器(PLC)
Abstract
Atfirst,thepaperintroducestheconceptionoftheindustrialrobotandtheelertaryinformationofthedevelopmentbriefly.What'smore,thepaperaccountsforbackgroundandtheprimarymissionofthetopic.Thepaperintroducesthefunction,composingand classificationofthemanipulator,tellsoutthefree-degreeandtheformofcoordinate.Atthesametime,thepapergivesouttheprimaryspecificationparameterofthismanipulator.Thispaperdesignsthestructureofthehandandtheequipmentofthedriveofthemanipulator,andanalyzestheerroroftheorientationofthefingers.Thepaperdesignsthestructureofthewrist,computestheneeded momentofthedrivewhenthewristwheelsandthemomentofthedriveofthepump. Thepaperdesignsthestructureofthearm,anddesignsthehydraulicpressurebufferwhenthemanipulator'sarmflexes,ascend,descendandwheels. Thepaperdesignsthesystemofairpressuredriveanddrawstheworkprinciplechair.ThemanipulatorusesPLCtocontrol.ThepaperinstitutestwocontrolschemesofPLCacordinetotheworkflowofthemanipulator.Thepaperdrawsouttheworktimesequencechartandthetrapeziachart.Whats more,thepaperworkoutthecontrolprogramofthePLC.
KEYWORDS:industrialrobot,manipulatorpump,Hydraulic drive,PLC
目录
摘要1
Abstract 2
第一章绪论4
第二章设计方案的论证6
第一节机械手的概述6
第二节机械手的组成与分类6
第三节机械手的总体设计8
第四节机械手腰座结构的设计10
第五节机械手手臂和手爪的结构设计12
第六节机械手的机械传动机构的设计17
第七节机械手驱动系统的设计21
第八节机器人手臂的平衡机构设计27
第三章理论分析和设计计算29
第一节确定液压系统基本方案29
第二节拟定液压执行元件运动控制回路30
第三节确定液压系统的主要参数31
第四节计算和选择液压元件36
第四章电机选型有关参数计算38
第一节有关参数的计算38
第二节电机型号的选择40
第五章机械手控制系统的设计42
第一节机械手控制系统设计42
第二节PLC外部接线设计45
第三节机械手控制系统软件设计47
结束语49
参考文献50
致谢51

PLC接线图A1

机械布局图

液压系统图A1

2摘要

4设计所包含文件

1字数

3说明书前三页

















")







