
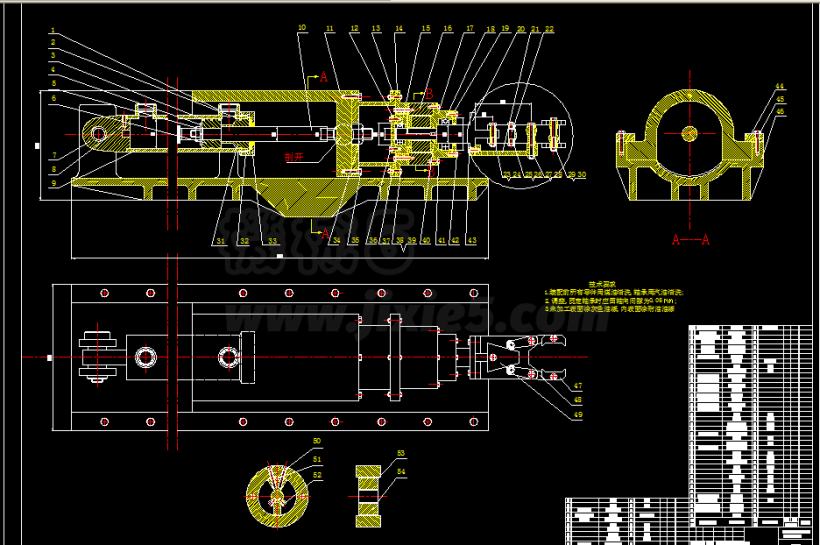
坐标式液压驱动机械手装配图
【优秀毕设,CAD2007版本,可做参照,使用时可自行编辑,仅供参考?本次设计的工业机械手属坐标式液压驱动机械手。具有手臂伸缩,回转,升降,手腕回转四个自由度。因此,相应地有手腕回转机构、手臂伸缩机构,手臂回转机构,手臂升降机构等构成。各部分均用液压缸或液压马达驱动与控制。
采用一个回转液压缸,实现腕部的旋转运动。从A―A剖视图上可以看到,回转叶片(简称动片)用螺钉,销钉和转轴10连接在一起,定片8则和缸体9连接。压力油分别由油孔5.7进出油腔,实现手部12的旋转。旋转角的极限值由动,静片之间允许回转的角度来决定(一般小于),图中缸可回转。腕部旋转位置控制问题,可采用机械挡块定位。当要求任意点定位时,可采用位置检测元件(如本例为电位器,其轴安装在件1左端面的小孔)对所需位置进行检测并加以反馈控制。
坐标式液压驱动机械手设计()

坐标式液压驱动机械手剖视详图
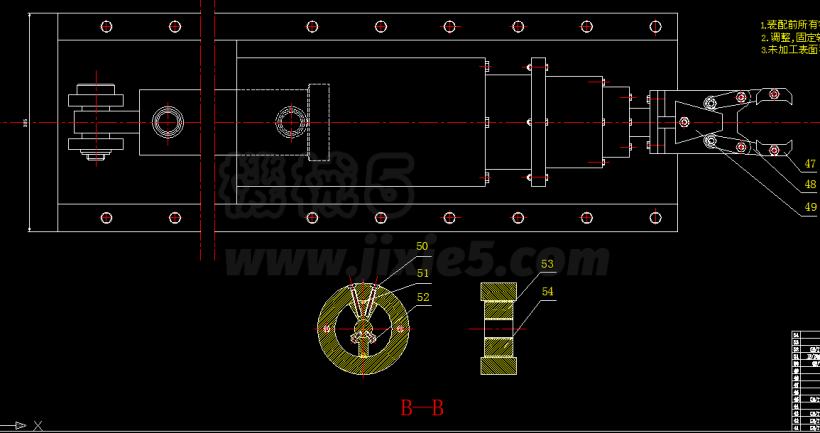
坐标式液压驱动机械手俯视图及局部细节图
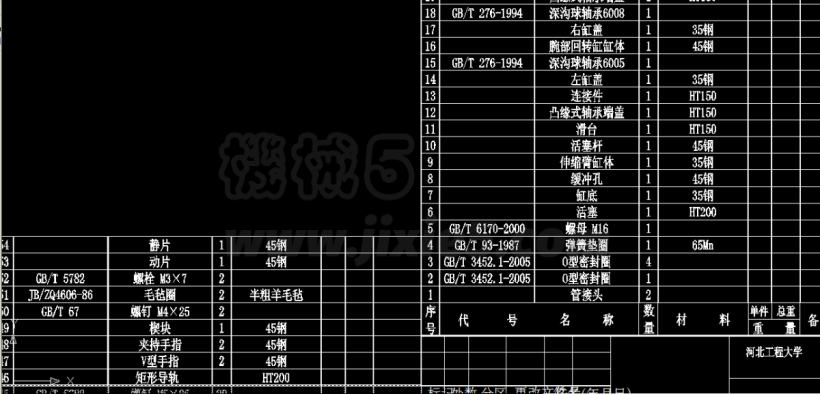
标注明细表





















")

")


