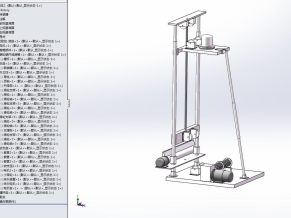
三维模型
本课题将设计一个四自由度机械手,其中,三个移动自由度,需完成X、Y、Z三维空间内的移动要求,另外一个手部夹持工作,完成手部搬运。它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
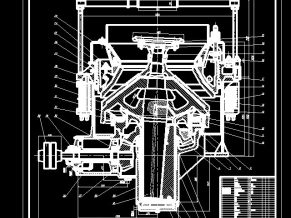
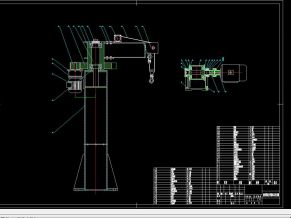
二维图纸
轴固定座
气缸座
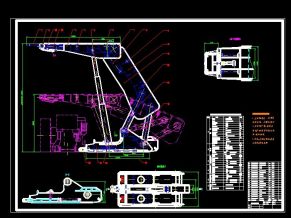
手爪部分细节图
线性模组机械手总装图
转杆
三维图纸
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: