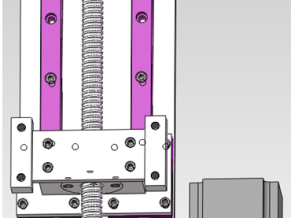
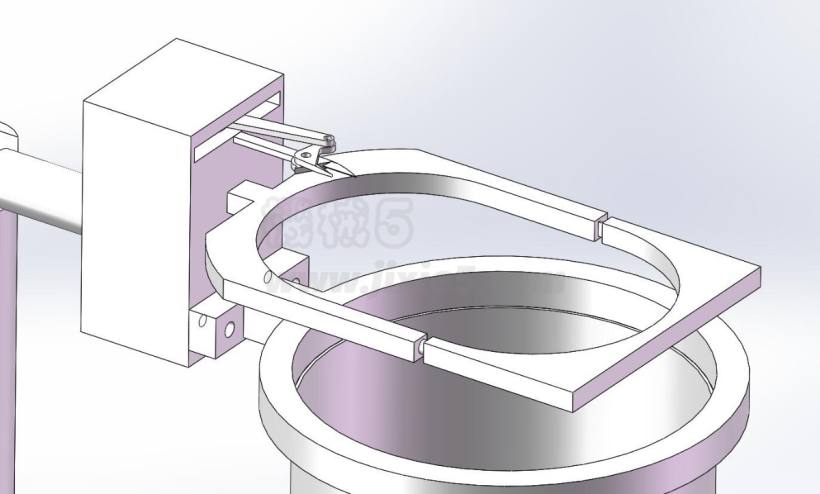
三维模型
首先,从搜集的资料来看,关于便携式采摘器的研究很少,所以很多地方了参考国内外关于苹果采摘机器人的设计思路,提出本次课题设计研究的基本原则。其次结合果园实际情况,以整个装置中的采摘机构为主进行设计工作,同时对其他各部分机构进行了具体的结构设计,除此之外,还结合果园植株的实际生长情况对装置的各部分零件的参数规格进行了计算,利用所学知识对整个装置的伸缩杆进行稳定性校核,以及对主要零件进行强度校核,确保方案的可行性。
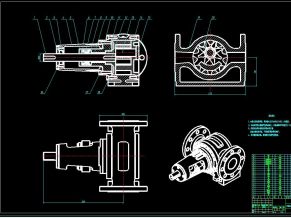
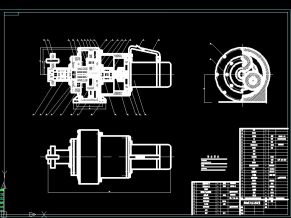
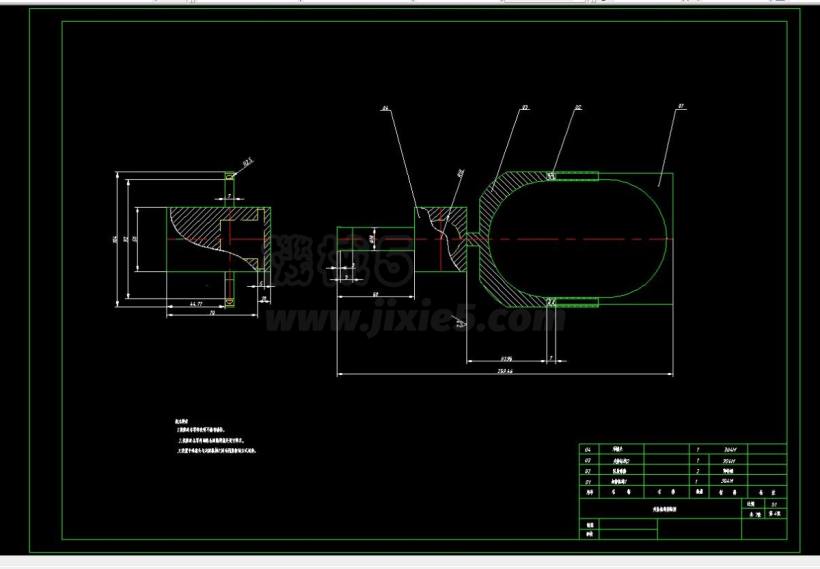
采摘头部件图
夹持部件

切割机构

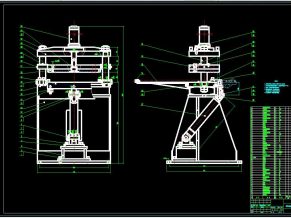
总装图
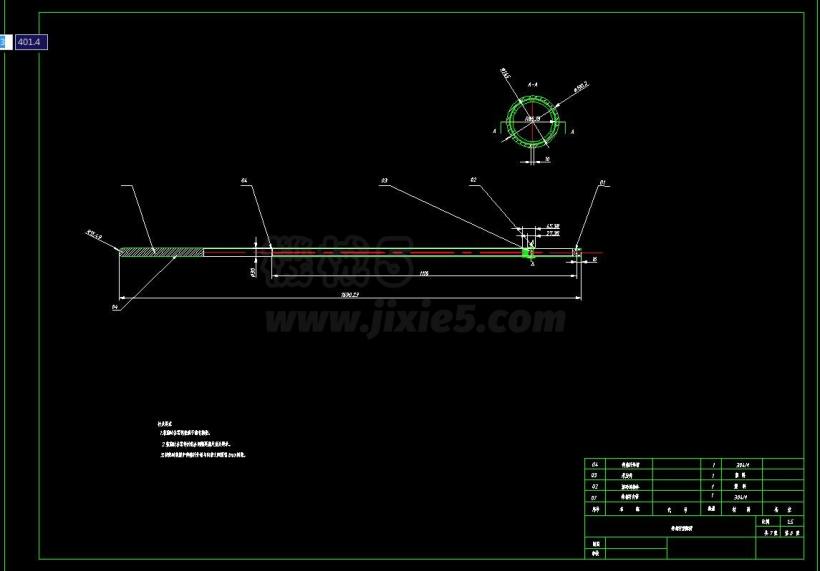
伸缩杆部件

伸缩管外管图

目录及字数统计