三维模型
本设计旨在设计研究出一款无动力外骨骼弹簧-离合器系统。这是一款无动力式的外骨骼机器人,利用弹簧-离合器自身的能量循环,从而实现辅助用户正常行走的目的。这款外骨骼机器人完全可穿戴在用户身上,并贴合人体腿部设计,在保证实现辅助用户正常行走目的的同时,提升用户使用时的舒适度。针对老年人腿脚不便的情况,该外骨骼机器人能够减少老年人在正常行走时的能量消耗的同时,还能对老年人的腿部起到一个支撑的作用,从而辅助老年人正常的站立和行走。

髋关节弹簧离合器模型

膝关节弹簧离合器模型

目录及字数

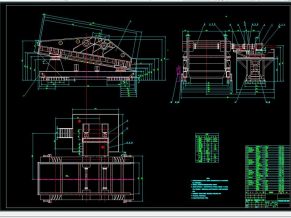
总装图

从动轴

转轴零件图

挡板零件图

髋关节挡板上零件图

主轴

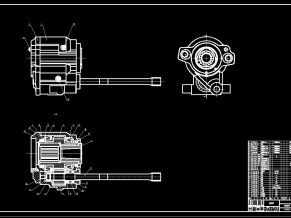
髋关节弹簧离合器装配图

髋关节弹簧离合器装配图2

髋关节挡板下零件图