

四坐标圆柱形机器人(机械手)结构设计说明书
【优秀毕设,CAD2007版本,可做参照,使用时可自行编辑,仅供参考?
摘要
码垛机器人作为现代码垛系统中最重要的设备,它的操作范围、码垛速度、稳定性等工作能力决定了整个码垛系统设计的成败。本文根据码垛系统的应用确定码垛机器人的工作空间范围、码垛能力等性能参数。
本中主要研究有四大部分内容:一、分析了常用码跺机器人的结构,综合优化后确定本码垛系统中机器人的机械设计结构;二、四坐标圆柱形机器人的机械结构设计及关键零部件的选型与设计:三、通过对直流伺服电机控制特性分析,应用PWM调速技术对直流伺服电动机调速,本文设计了转速电流双闭环电机调速系统及其参数;四、建立机器人三维模型,可在Simulink环境下对机器人机电系统控制性能进行仿真。
本文重点详述了研制的4自由度垂直关节型机器人的机构原理和结构设计,并对其运动学、运动解耦性及机构放大原理进行了分析。
关键词:四坐标圆柱形机器人;码垛系统;机器人设计;机械手

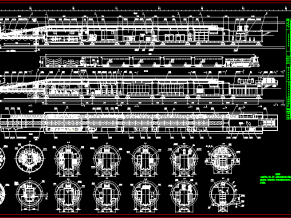
机器人(机械手)总成图

全套资料预览

机械手手部结构

底腰部组件

腰部旋转输出轴

轴承座

垂直水平臂

密封压盖

外透盖

旋转轴套




















")




