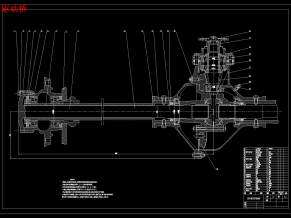
ЛњаЕЪжзАХфЭМЃЈA0ЃЉ
вКбЙЛњаЕЪжЪЧвЛжжОпгазЅШЁКЭзЊвЦЙЄМўЕФздЖЏЛЏЩшБИЃЌЙуЗКЕФгІгУгкЙЄвЕСьгђЁЃ
БОЩшМЦжаЕФЛњаЕЪжВЩгУЙиНкзјБъаЮЪНЃЌЭЈЙ§вКбЙЯЕЭГЧ§ЖЏЃЌPLCЯЕЭГПижЦРДЪЕЯжЫФИіздгЩЖШЁЃ
дкЩшМЦжаЃЌЮвдЫгУвКбЙЁЂЛњаЕКЭЕчЦјЕШЗНУцЕФжЊЪЖШЋУцЯЕЭГЕиЭъГЩСЫздЖЏЩЯЯТСЯЛњаЕЪжЕФЩшМЦЃЌжївЊАќРЈЛњаЕЯЕЭГЃЌвКбЙЯЕЭГКЭPLCПижЦЯЕЭГЁЃЛњаЕВПЗжЕФЩшМЦжївЊЪЧдкНсЙЙЗжЮіКѓЕФЛњаЕСІбЇМЦЫуЃЌАќРЈЪжВПЁЂБлВПКЭЛњЩэЃЌвКбЙЯЕЭГЕФЩшМЦАќРЈЯЕЭГВЮЪ§ЕФЩшМЦКЭдЊМўбЁаЭЃЛПижЦЯЕЭГЕФЩшМЦАќРЈЛцжЦЬнаЮЭМКЭЕчЦјдЊМўбЁаЭЁЃ

ШЋВПЮФМў

ЪжБлСуМўЭМЃЈA2ЃЉ

вКбЙЯЕЭГдРэЭМ.A1dwg1

зжЪ§

PLCПижЦЬнаЮЭМ ЃЈA2ЃЉ

PLCСЌНгЭМЃЈA2ЃЉ

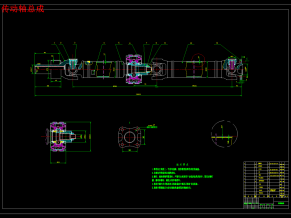
ЛњаЕЪж ЪжВПНсЙЙЭМЃЈA1ЃЉ

ЛњаЕЪжЪжБлКЭЭѓВПНсЙЙЭМ(A0)

ФПТМ

ЮФЕЕвГУц
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ