

三维总装图
管道相贯线自动切割机器人支撑定位系统
摘要:相贯线切割机器人是用于管道相贯线切割的自动化工业机器人。它以加工精度高,自动化程度强以及效率出众等优点,将取代一直以来的手工作业。相对于现有的相贯线加工设备,一种低成本的相贯线切割机器人具有十分重要的研究意义及工程应用前景。本篇中将提出一种全新的切割机器人结构和独特的驱动分配原理,使得设计的机器人控制简单,加工效果好。并尽量控制其制作成本。该机器人已经在申请专利过程中。
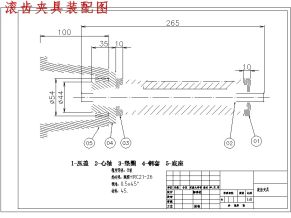
本文着重于设计机器人的支撑定位系统。对其整个支撑定位系统进行结构设计。还包括工作状态下工作台的轴向位移和定位时自动升降两种传动方案,并对其校核。设计适合管道加工的专用夹具。设计过程中全部采用三维建模,直观的展示装配效果。另外,对其控制和切割原理进行简述。
关键词:工业机器人;相贯线;管道夹具; Pro/E建模
Supporting and Positioning System of pipeline Intersection Line Auto-cutting Robot
Abstract: Robot of Intersection line Cutting is an industrial robot for cutting intersection line on the surface of pipe-line. It is excellence for high accuracy, automation, and efficiency, so that will replace handwork which has been a long time. Those existing fabricating machineries for cutting intersection line are almost high cost. In this paper, one kind of new structure and special drives-fixed for the robot will be brought out. It makes the robot easy to control and still have great effect with a low cost. Now this robot is applying for a patent.
This paper will pay more attention in the supporting and positioning system of the robot. It mentions the structure of the whole system, and brings two schemes of drive for axial-movement and positioning-movement. A special fixture for pipe-line is designed. All parts of the robot are designed in Pro/E, to view the effort of assemble. At last, the principles of control and cutting are generally discussed.
Key words: Industrial robot; Intersection line; pipe-line fixture; 3D modeling
目录
第一章绪论- 1 -
1.1概述- 1 -
1.2现状- 1 -
1.2.1相贯线加工实例- 1 -
1.2.2各类型数控相贯线切割机的特点及其应用情况- 2 -
1.2.3现有相贯线设备及其工作原理- 3 -
1.3数控相贯线切割机发展趋势- 6 -
1.3.1数控相贯线切割机的发展- 6 -
1.3.2专用数控相贯线切割机的发展- 7 -
1.4结语- 7 -
第二章相贯线切割机器人运动方案拟定- 9 -
第三章机器人的切割系统简述- 13 -
第四章管道相贯线切割机器人的支撑系统- 15 -
4.1概述- 15 -
4.2该系统对于管道的支撑- 15 -
4.3管道夹紧机构- 17 -
4.4机器人支撑系统里的移动结构- 18 -
4.4.1概述- 18 -
4.4.2直线运动副的选择- 19 -
第五章支撑系统中长支撑架的应力分析- 23 -
5.1前言- 23 -
5.2受力分析- 24 -
5.3 ANSYS软件分析步骤及结果- 25 -
5.3.1导入模型- 25 -
5.3.2参数确定- 26 -
5.3.3约束和载荷- 27 -
5.3.4分析结果- 29 -
第六章管道相贯线切割机器人的定位系统- 33 -
6.1定位原理- 33 -
6.2螺旋支撑的强度校核- 34 -
6.2.1初始条件- 34 -
6.2.2耐磨性计算- 34 -
6.2.3自锁验算- 35 -
6.2.4计算驱动转矩- 35 -
6.2.5螺杆强度计算- 35 -
6.2.6螺纹牙强度计算- 35 -
6.2.7螺杆稳定性计算- 36 -
6.2.8螺杆的刚度计算- 36 -
6.2.9计算横向振动- 36 -
6.2.10效率计算- 37 -
6.3定位元器件- 37 -
第七章管道相贯线切割机器人控制原理描述- 39 -
结论41
参考文献- 43 -
致谢- 45 -

A总装图

A支撑系统装配图

设计目录

摘要部分

字数统计

V型块

V型块及横梁受力分析

侧立柱

侧立柱连接块

齿轮罩

滚子

滚子套

加紧原理图

夹具

小滑臂

长支撑架受力分析

支撑螺母

支承座

大齿圈

A切割装配图



















")





