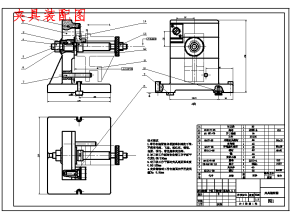
A三维总装图
简易手动球形水果采摘器设计
摘要
本课题运用制图软件对采摘器进行机构设计,可伸缩夹取式采摘机械是一种为解决人们采摘高处果实难而创新设计的工具,同时本设计大大的方便了农民工采摘油茶果的过程及采摘效率的提高。设计机构内容包括:采摘机构、可伸缩杆机构、和收集机构并用solidworks软件绘制了机构的三维图以助理解。可伸缩夹取式油茶球形果实采摘机构主要采用了采摘机携手和铝合金管可伸缩机构,采摘宽度范围较大效率高、伸缩长短可调节,采摘较灵活省力,果实由铝合金管的旁边的引导轨道滑出,最小采摘水果直径为40mm,最大采摘水果为80mm,收集极为方便省力,铝合金管可伸缩机构又使其质量较轻,便于携带,经投产和改进后可望解决农民朋友对于直径相近球形果实的采摘难题,市场前景广阔。
关键词:可伸缩性;球形水果;采摘;夹取式;机构设计。
Abstract
In this paper, the drawing software is used to design the mechanism of the picker. The retractable clip picking machine is an innovative design tool to solve the problem of people picking high fruits. At the same time, the design greatly facilitates the process and efficiency of migrantworkers picking camellia oil. The design of the mechanism includes: picking mechanism, retractable bar mechanism, and collecting mechanism. The three-dimensional drawing of the mechanism is drawnwith Solidworks software to help understand. The retractable clip type spherical fruit picking mechanism of Camellia oleifera mainly adopts the picking machine hand in hand and the aluminum alloy tube retractable mechanism. The pickingwidth range is large, the efficiency is high, the retractable length is adjustable, and the picking is flexible and labor-saving. The fruit slides out from the guide track beside the aluminum alloy tube. The minimum picking fruit diameter is 40mm, and the maximum picking fruit is 80mm. The collection isvery convenient and labor-saving. Aluminum alloy After putting into operation and improvement, it is expected to solve the problem of picking spherical fruitswith similar diameter by farmers, and the market prospect is broad.
Keywords: scalability; spherical fruit; picking; clamping; mechanism design.
目录
摘要1
Abstract 2
第1章5
第2章绪论6
2.1课题背景及意义6
2.2课题国内外研究现状6
第3章总体设计思路10
3.1本设计的内容和技术参数10
3.1.1设计内容: 10
3.1.2技术参数: 10
3.1.3果实采摘方式的选择10
3.2基于伸缩式机械手臂的水果采摘装置的总体设计11
第4章采摘器的设计13
4.1采摘器常见种类13
4.2采摘器的选择13
4.3采摘器的设计14
4.3.1尺寸计算14
4.3.2采摘器的强度校核计算14
4.4软件建模16
4.4.1绘图软件介绍16
4.4.2绘图方法16
4.4.3采摘器效果图展示17
第5章关键部位的设计与分析18
5.1机械手臂的种类18
5.2机械手臂的选择20
5.3机械手臂的设计21
5.3.1尺寸计算21
5.3.2材料选择21
5.3.3强度校核22
5.4软件建模24
5.4.1绘图方法24
5.4.2机械手臂效果图展示24
5.5接收传送装置的设计24
5.5.1接收装置设计原则25
5.5.2材料选择25
5.5.3尺寸设计25
5.5.4接收传送装置效果图25
5.6手持固定部分的组成26
总结与展望28
致谢29
参考文献30

A0总装图

下压头

伸缩管3

伸缩管2

伸缩管1

上压头

夹头压板

固定网件

动头和动板的焊接件

定头和定板的焊接

把手

设计所包含文件

设计目录

字数

摘要

钻套

设计参数及设计方案