电路图A0
旋转关节机器人的末端定位精度分为重复定位精度和绝对定位精度,由于机械加工、装配等方面的影响,绝对定位精度较低。为了解决这一问题,采用标定技术来提高绝对定位精度,就是软件的补偿方法。本文采用基于双PSD的标定装置,首先要对机器人建立运动学模型并且推导标定算法;然后进行机械部分设计,包括机器人末端连接的法兰盘和PSD夹具;对于电路部分,需要设计一个电路板,能够实现模拟运算、信号处理以及与工业计算机通讯等功能;最后根据标定流程进行编程。通过实验验证,该标定装置工作稳定,能够有效补偿各种因素造成的末端位置误差。
关键词:运动学模型标定算法PSD信号处理

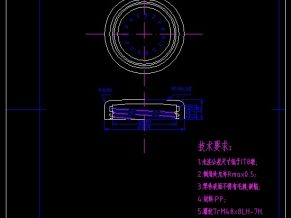
零件图12张

流程图A0

目录字数

装配图A0

全部文件