臂二A4
在抗震救灾、石油管道检测方面,由于人员无法到达,因此需要采用轻巧的机器人进入内部进行执勤。迫于实际需求,六足机器人被设计出来以应对这些需求。随着研究的不断进展,六足机器人对地形的适应能力越来越强,并且不再像之前一样那么容易受到天气的影响,另外,在实际使用方面,目前的六足机器人能够搭载更多的传感器,为信号的采集提供了更多的拓展。对于机器人的研究进程,我国虽然已经取得一定的成果但是仍然没有到达世界顶尖的水平,而对于机器人来说,机械结构是其稳定运行并且实现一定功能的前提保证,但是我国的制造业水平却没有达到比较发达的地步。
基于此种现状,本文以六足机器人作为研究对象,从机器人的研究现状到整体结构,然后将机器人按照结构进行划分,从零件的选型入手,对其进行理论计算,然后按照机器人中的零件设计准则对零件进行具体尺寸的设计,最后,为了保证设计的合理性,再对上述设计过程中设计的零件进行验证。本次设计由四个主要部件组成:支撑腿升降装置、支撑腿摆动装置、支撑轮转动装置、主体钢结构。在完成机械结构的设计后,还需要有相应的硬件电路作为机器人控制的基础,所以在本文中除了机械结构外,还对机器人的硬件电路进行了设计,从原理图的绘制到PCB的绘制,完成了一个六足机器人的整体设计。
关键词:六足机器人;选型设计;主要部件;养护维修。

臂一A4

车轮耳环A3

车轮轴A3

链轮A3

目录字数

排图A0

主体钢结构A1

全部文件

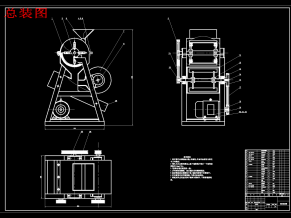
总装图A0
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!