电路图 A0
本文研究对象压铸产品取件机器人本质上是一种串联机器人,其主体结构分别为机械臂安装的底座机构,多个运动关节模组机构组成的串联机械臂及末端夹持执行机构。压铸产品取件机器人各关节主体零件大多数采用复杂形状的大铸件,一些辅助零件比较小且数量多,机械臂一体式的结构增强了整个串联机械臂的强度和刚度;在驱动布局上,相邻两轴的电机安装于同一轴部的主体零件上,极大的提高了动力的传递效率;六自由度取件机器人末端设计一种气动机械爪,极大的提高机器人的工作空间和抓取效率。本文具体研究内容如下:
首先,根据工作空间和自由度的要求,在满足各个运动构件的参数要求情况下,设计压铸产品取件机器人的总体机械结构方案;
其次,根据工作要求和性能指标要求,对压铸产品取件机器人的抓取运动进行轨迹的规划和设计;
最后,根据技术参数和性能指标要求,绘制压铸产品取件机器人的二维装配图,并对压铸产品取件机器人中的传感器、驱动装置等设备进行选型和设计。
关键词:压铸产品取件机器人方案设计轨迹规划样机模型

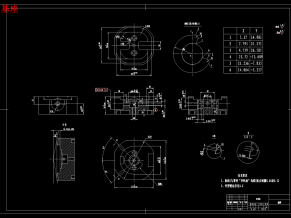
零件图5张A0

装配图 A0

目录字数

全部文件