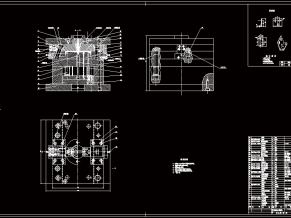
ҫИФ®»ъЖчИЛЛщУРНјјҜәП
ФЦәҰҫИФ®»ъЖчИЛөДЙијЖЈЁИ«МЧЙијЖј°CADНјЦҪЈ©
ХӘТӘ
ФЦәҰЛСҫИ№ӨЧчөДёҙФУРФЎўОЈПХРФәНҪфЖИРФёшҫИФ®№ӨЧчҙшАҙБЛј«ҙуөДА§ДСЎЈҫИФ®»ъЖчИЛТФЖдМе»эРўБй»оөИЦо¶аУЕөгіЙОӘФЦәҰёЁЦъҫИФ®өДУРР§№ӨҫЯІўТэЖрИ«КАҪзөД№г·ә№ШЧўЎЈОДЦР·ЦОцБЛҫИФ®РР¶ҜЦРК№УГҫИФ®»ъЖчИЛөДұШТӘРФәНҝЙРРРФЈ¬ҪйЙЬБЛ№ъДЪНвҫИФ®»ъЖчИЛөДСРҫҝАъК·әН·ўХ№ёЕҝц.
ДҝВј
өЪ1ХВРчВЫ1
1.1ҝОМвСРҫҝТвТе1
1.2ҫИФ®»ъЖчИЛУҰУГөДұШИ»РФ1
1.2.1ФЦәҰПЦіЎУ°ПмҫИФ®№ӨЧчөДЦчТӘТтЛШ1
1.2.1»ъЖчИЛФЪҫИФ®№ӨЧчЦРөДУЕКЖ2
1.3№ъДЪНвҫИФ®»ъЖчИЛСРҫҝПЦЧҙ2
1.4ҫИФ®»ъЖчИЛөД·ЦАа3
1.4.1ВДҙшКҪ»ъЖчИЛ3
1.4.2ЙЯРОЈЁИдіжЈ©»ъЖчИЛПөНі4
1.4.3Ц©ЦлРО»ъЖчИЛ5
1.4.4·ЙРР»ъЖчИЛ5
1.5ҫИФ®»ъЖчИЛ·ўХ№·ҪПт5
1.5.1ИәМе»ъЖчИЛСРҫҝ5
1.5.2И«ЧФЦч»ъЖчИЛСРҫҝ6
1.5.3И«ЧФЦч»ъЖчИЛСРҫҝ6
1.5.4ИООс¶аСщ»Ҝј°ҙ«ёРјмІвјјКх6
1.6ЦчТӘДЪИЭ7
өЪ2ХВЧЬМе·Ҫ°ёЙијЖ8
2.1»ъРөКЦ№ӨіМёЕКц8
2.2№ӨТө»ъРөКЦЧЬМеЙијЖ·Ҫ°ёВЫКц9
өЪ3ХВ»ъЖчИЛЧЬМе·Ҫ°ёЙијЖ11
3.1ЧЬМеЙијЖөДЛјВ·11
3.2ЙијЖ·Ҫ°ё№эіМј°МШөг11
3.3ЧЬМеҪб№№өДЙијЖәНұИҪП11
3.3.1РРЧЯ»ъ№№өДЙијЖ11
3.3.2РРЧЯ»ъ№№Ҫб№№ЙијЖ12
3.3ҙуРЎЧ¶іЭВЦөДЙијЖәНРЈәЛ19
3.4ЦбўсөДЙијЖәНРЈәЛ23
3.5јьөДРЈәЛ32
3.6Л«°ЪұЫЗэ¶ҜПөНіөДјЖЛг32
3.7Л«°ЪұЫјхЛЩөз»ъөДСЎИЎ33
3.8Л«°ЪұЫјхЛЩЖчөДСЎИЎ34
өЪ4ХВ»ъРөКЦҙуұЫІҝҪб№№35
4.1ҙуұЫІҝҪб№№ЙијЖөД»щұҫТӘЗу35
4.2ҙуұЫІҝҪб№№ЙијЖ36
4.3ҙуұЫөз»ъј°јхЛЩЖчСЎРН36
4.4јхЛЩЖчІОКэөДјЖЛг37
өЪ5ХВРЎұЫҪб№№ЙијЖ41
5.1КЦЧҰјРіЦЖчҪб№№ЙијЖУлРЈәЛ41
5.1.1КЦЧҰјРіЦЖчЦЦАа41
5.1.2јРіЦЖчЙијЖјЖЛг42
5.2КЦНуЖ«ЧӘЗэ¶ҜјЖЛг43
5.3Цб·ЦОцј°јЖЛг46
5.4ЦбіРөДКЩГьРЈәЛ47
5.5ЦбөДЗҝ¶ИРЈәЛ47
өЪ6ХВ»ъЙнЙијЖ49
6.1ІҪҪшөз»ъСЎФс49
6.2јьөДСЎФсәНРЈәЛ54
6.3»ъЙнҪб№№өДЙијЖ55
ЧЬҪбУлХ№Ны56
ЦВР»57
ІОҝјОДПЧ58

ВДҙшВЦ2

ИбВЦ

КдіцЦб

ТЖ¶ҜІҝ·ЦЧ°ЕдНј

Ц§іЕ°е

ЦРјдЦб

Цб1
ЙкГчЈәДЪИЭАҙЧФУГ»§ЙПҙ«Ј¬ЦшЧчИЁ№йФӯЧчХЯЛщУРЈ¬ИзЙжј°ЗЦИЁОКМвЈ¬ЗлУлОТГЗБӘПөЈ¬ОТГЗҪ«ј°КұҙҰАнЈЎ
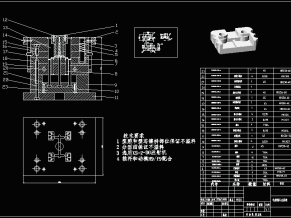


![ДЈҫЯЧЁТөЙијЖ-ёҙУЎ»ъРЎ¶ЛёЗЧўЛЬДЈҫЯЙијЖ[Рұ¶Ҙ]ҙшCADНјЦҪ](http://img.jixie5.com/d/file/2017/01/21/94033ebc8b61de732fb8b1b28693fbdc.png@!l)