

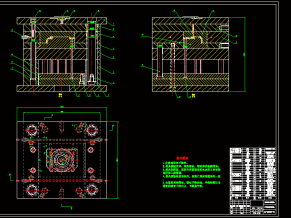
装配图11 2004
支撑目标运动机构技术设计全套齐全(含全套CAD图纸)
摘要
本文详细介绍了弹体支撑运动机构及目标模拟器控制系统的设计方案,其目的是为了检测导弹弹头的跟踪系统安装位置的准确性,并为弹体(或者弹头)和检测装置提供放置安装平台。在机械结构上论述了蜗轮蜗杆减速箱、丝杠、步进电机、导轨、谐波齿轮等零件的选型。弹体支撑运动机构为整弹体(或弹体头)提供安装平台,并实现了其俯仰运动和自身滚转运动的要求,同时也要为目标运动机构提供安装平台;目标运动机构主要有步进电机控制的小型转台和延长支架组成,是目标模拟器的安装平台,再软件的控制下实现了转台的弧线运动,同时也保证了目标模拟器一直对正弹体头中心的要求。在控制方面阐述了S7-200 PLC的工作原理、OP320显示屏的操作界面的编制软件的编制方法和编制的注意事项、同时阐述了这次设计的电路的详细方案,综合介绍了S7-200 PLC在工程实际中的一次应用。
目录
摘要…………………………………………………………………Ⅰ
Abstract …………………………………………………………………Ⅱ
目录…………………………………………………………………Ⅲ
第一章概述……………………………………………………………………1
1.1课题的意义……………………………………………………………1
1. 2课题的发展前景…………………………………………………………………1
1. 3课题研究的内容……………………………………………………………1
1. 4课题的实现方法…………………………………………………………2
第二章弹体支撑运动机构及目标模拟器控制系统设计……………………5
2.1总体框架的设计……………………………………………………………………5
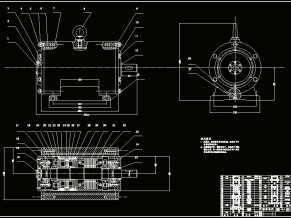
2.2弹体支撑运动机构的设计…………………………………………………………5
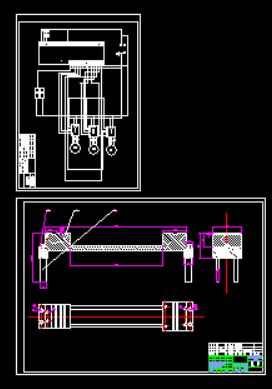
2.3目标运动机构的设计……………………………………………………………13
第三章目标控制系统设计…………………………………………………18
3.1电源的选择……………………………………………………………18
3.2显示屏的选择…………………………………………………………………18
3.3电机驱动器的选择………………………………………………………………21
3.4设计电路的功能示意图………………………………………………………………22
第四章控制软件的编制…………………………………………………23
4.1 OP320显示屏的设计………………………………………………………………23
4.2 S7-200软件的编制………………………………………………………………27
结束语…………………………………………………………………………33
参考文献………………………………………………………………………34

电路图

俯仰从动轴

俯仰平台04

俯仰主动轴

卡具装配图A2












")
")
")
(含cad图纸)")
")
(设计带CAD图纸)")
")


