

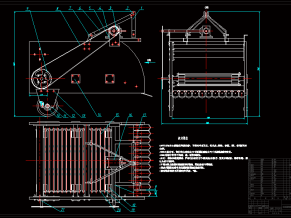
装配图
纽扣自动冲压组装台异形零件夹持装置设计(含CAD图纸和WORD说明书)
摘要
纽扣自动冲压组装台异形零件夹持装置采用夹持机构进行设计.夹持机构具有刚度大、承载能力强、误差孝精度高、自重负荷比孝动力性能好、控制容易等一系列优点可以作为航天上的对接器、航海上的潜艇救援对接器;工业上可以作为大件的装配机器人、精密操作的微动器;可以在汽车总装线上自动安装车轮部件;另外,医用机器人,天文望远镜等都利用了并联技术。
本文夹持机构的研究方向:
(1)夹持机构组成原理的研究
研究夹持机构自由度计算、运动副类型、支铰类型以及运动学分析、建模与仿真等问题。
(2)夹持机构运动空间的研究
(3)夹持机构结构设计的研究
夹持机构的结构设计包括很多内容,如机构的总体布局、安全机构设计。
由于本人水平有限,文中的错误和不足在所难免,恳请各位老师给予批评和指正。
目录
1前言1
1.1课题研究背景意义1
1.2国内外研究现状2
2并联机械手的结构及工作原理6
2.1并联运动机构概述6
2.2并联的结构及机械运动原理7
2.3并联机械手的总体结构7
2.4控制系统结构及工作原理8
2.5夹持机构工作空间的分析9
2.6臂部结构设计的基本要求10
3夹持机构主要部件的设计13
3.1电动机选型13
3.1.1电机的分类13
3.1.2选择步进电机的计算14
3.2传动结构形式的选择17
3.3几何参数的计算17
3.4轴的设计及校核18
3.5轴承的寿命校核20
3.6手爪夹持器结构设计与校核22
3.6.1手爪夹持器种类22
3.6.2夹持器设计计算23
3.7夹持装置气缸设计计算24
3.7.1初步确系统压力24
3.7.2气缸计算25
3.7.3活塞杆的计算校核27
3.7.4气缸工作行程的确定27
3.7.5活塞的设计28
3.7.6导向套的设计与计算28
3.7.7端盖和缸底的计算校核29
3.7.8缸体长度的确定30
3.7.9缓冲装置的设计30
3.8气压元件选取及工作原理30
3.8.1气源装置30
3.8.2执行元件31
3.8.3控制元件32
3.8.4辅助元件33
3.8.5真空发生器34
4夹持机构机夹持机构空间分析35
4.1夹持机构夹持机构机的运动学约束35
4.1.1连杆杆长约束35
4.1.2运动副转角约束35
4.1.3连杆杆间干涉36
4.2确定夹持机构空间的基本方法36
总结37
参考文献38
致谢39

图纸集合











")
")
")
模具-五金-笔记本电脑壳上壳冲压模设计")
模具夹子冲压件设计")
模具-封闭板成形模及冲压工艺设计")
模具-电机炭刷架冷冲压模具设计")
模具传动盖冲压工艺制定及冲孔模具设计")
自动外圆磨床自动上料系统设计(含全套CAD图纸)")
自动晾衣架设计(含全套CAD图纸)")