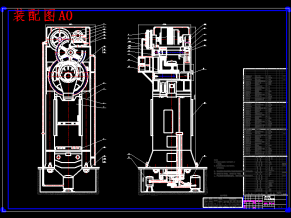
总装图A0
摘要
现在,高龄化社会正在急速老龄化,给老年人的护理施加了巨大的压力。中国的养老产业在短时间内发展起来了。现在还没有形成相对完善的养老制度,没有足以有效解决社会养老问题的养老制度。随着老年人比例的增加和劳动力比例的连续减少,在养老产业和老年人医疗产业中,很难投资更多的人力资源。成为可以代替老年人的养老和生活服务的一部分的辅助产品的市场需求。面向老年人的服务机器人的出现遵循这个要求,提供解决老年人问题的新方法和手段。养老服务机器人在世界上也成为了热门的研究和产业发展。
国内外科技的迅速发展离不开服务机器人的应用,本文主要研究对伴老年人服务的爬楼智能化机器人,将步行机器人与爬楼机构相结合,建立起机器人模型。
根据老年人用服务机器人的需求,提出了老年人用的爬楼的机器人的设计方式。楼梯升降机构是为了实现楼梯升降机器人的功能而设计的,分析了机构各部分的动作原理。同时,后轮由2组电机驱动,可实现任意旋转转弯。
完成整体计划设计后,分析伴老服务机器人的运行模式,计算马达各部分的功率和扭矩。然后检查了预备设计的主要部分,确认了安全性能。最后,为了实现伴老服务机器人的台阶升降的整体过程,在PROE 3D软件中构建了运动模拟模型。
关键词:老年人;伴老机器人;机械系统;结构设计;爬楼机构
目录
1绪论1
1.1课题研究背景1
1.1.1我国呈现人口老龄化的严峻形势1
1.1.2现代科技为解决社会养老难题提供新思路2
1.2课题相关要素分析2
1.2.1老年人及老龄化社会分析2
1.2.2机器人定义及其机器人趋势分析。 3
1.2.3伴老机器人相关研究现状分析3
1.3课题研究目的和意义6
1.4课题研究方法6
2伴老服务机器人机械结构总体设计方案8
2.1引言8
2.2伴老机器人设计构思8
2.2.1产品设计构思8
2.2.2功能设计构思9
2.2.3安全性设计9
2.2.4设计要求10
2.3伴老机器人设计定位10
2.3.1产品功能定位10
2.3.2产品使用环境定位11
2.4伴老服务机器人机械结构设计的规范11
2.5机构的设计方案介绍12
2.6关键结构材料选择21
3机器人工作的原理与核心的结构设计22
3.1引言22
3.2机器人结构组成22
3.3爬楼梯工作原理和上下楼过程23
3.4主要硬件设计选择25
3.5机器人驱动方式25
3.5.1伴老机器人驱动方案的构思25
3.5.2大轮电机扭矩与功率26
3.5.3小轮电机扭矩与功率27
3.6机器人关键零部件设计与校核27
3.6.1滚动轴承的选择及校核计算27
3.6.2轴的校核计算29
3.6.3齿轮的选择和校核计算30
4机器人控制系统设计35
4.1控制电路的设计35
4.2驱动电机的电路设计36
4.3传感器电路设计37
4.4电源模块的电路设计37
4.5伴老机器人控制系统软件设计38
5机器人上楼过程的运动仿真40
5.1引言40
5.2运动仿真的原理40
5.3创建驱动模型40
结论45
展望46
参考文献47
致谢49

大轮A3

电机1齿轮A3

小轮连杆A3

车身A1

连杆A3

设计所包含文件

字数

摘要

目录