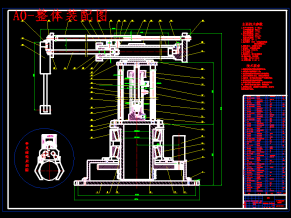
装配图
五自由度MOTOMAN焊接机器人动力学分析与仿真计算
摘要
随着科学技术的发展以及工业自动化生产的需求,焊接技术在工业生产中的作用越来越重要,而且在一定程度上焊接技术的优良程度直接影响产品或零件的质量和性能。焊接机器人在工业机器人中占有重要地位。我国焊接机器人已具有一定的规模,但与国外相比焊接生产需求相差甚远。因此努力研究焊接机器人具有重要意义。
本课题主要对一种五自由度MOTOMAN焊接机器人的机构进行分析,在运动学基础上,利用拉格朗日方程或牛顿-欧拉方程导出五自由度焊接机器人的动力学方程并且进行仿真分析。针对五自由度MOTOMAN机器人运动学的可达工作空间进行分析,用MATLAB或相应软件对五自由度机器人进行动力学仿真计算。
关键词:Motoman机器人;运动学;动力学;仿真
目录
摘要I
Abstract II
第1章绪论1
1.1机器人研究的背景和意义1
1.2我国机器人研究现状1
1.3国外机器人的研究现状2
1.4研究课题的提出2
1.5机器人仿真技术的应用及研究3
第2章机器人机械结构的设计4
2.1机器人机械设计的特点4
2.2方案功能设计与分析4
2.3方案结构设计与分析5
第3章五自由度机器人运动学分析7
3.1机械臂位姿的描述7
3.1.1位置的描述--位置矢量7
3.1.2方位的描述--旋转变换7
3.1.3坐标系的描述8
3.1.4齐次坐标变换9
3.1.5平移齐次坐标变换9
3.1.6旋转齐次坐标变换9
3.1.7复合齐次坐标变换10
3.2运动学数学模型的建立10
3.2.1数学模型的建立10
3.2.2运动学正解11
3.2.3运动学逆解12
第4章五自由度机器人动力学分析13
4.1动力学概述13
4.2五自由度机械手动力学模型分析13
4.2.1机器人连杆系统的拉格朗日动力学方程13
4.2.2连杆系统动能14
4.2.3连杆系统势能15
4.2.4拉格朗日动力学方程15
4.3 Motoman机器人动力学分析18
4.3机器人可达工作空间分析21
第5章五自由度Motoman机器人动力学仿真24
5.1机器人的仿真简介24
5.2机器人实体建模25
5.3机器人动力学仿真29
5.3.1 ADAMS简介29
5.3.2 ADAMS多刚体动力学31
5.3.3五自由度机器人动力学仿真37
结论44
参考文献45
致谢46

字数

活塞杆零件图

摘要

缸盖零件图

设计所包含文件

目录