

球形六足机器人模型
【说明书+3D(SW2021版本)+CAD2007版本+程序代码,可做参照,使用时可自行编辑,仅供参考学习!】
本设计制作球形六足变形机器人,预计最终可实现的功能有手柄遥控、球形六足模式的变换、球形滚动行进和六足模式行走。
此次项目中我们只是针对该机器人制作实验模型,实现球形六足机器人的一部分功能,本文汇报了机器人模型制作过程有关机械结构的设计,硬件选型及软件的设计过程,机械结构设计主要包括机械本体上中间展开结构,下肢机械足和上肢机械臂。硬件方面选择以STM32作为控制核心部件与舵机控制板和九轴传感器相结合,所以在软件设计方面主要是基于STM32单片机控制的编程,以及Matlab求出机械足的运动反解结合舵机控制板实现机械足的正确轨迹。除此之外还有装配与实物调试以及市场前景的分析。
关键词:球形;六足;STM32

球形六足变形机器人结构及控制系统设计说明书

球形六足机器人总装图

球形六足机器人四视图

足结构装配

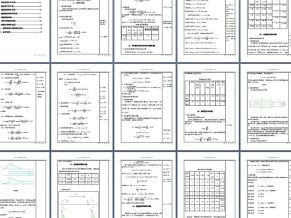
CAD图纸总预览

中间盘装配图

上肢装配图

腿装配图

电路图

支架圆盘

上肢与中间展开连接盘

设计目录

资料总预览




















+程序代码+电路图")
")
+CAD图纸+智能行走程序")
")
")
