数控车床自动上下料圆柱坐标型机器人设计图纸
整个工作系统工作方式如下,当数控车床加工完零件之后向自动上下料工业机器人发出信号,机器人运动到二号位置并取下数控车床主轴上的零件,然后运动到三号位置,把已加工好的工件放置在所需位置,然后运动到一号位置夹取待加工零件,再运行到二号位置将带加工零件安装在主轴上,从而使机床进行下一阶段的加工。设计完成:
(1)自动上下料工业机器人控制系统总体方案分析;
(2)自动上下料工业机器人控制系统硬件分析;
(3)自动上下料工业机器人控制电路研究与搭建;
(4)自动上下料工业机器人控制程序设计;
设计要求:
(1)自动上下料工业机器人能正常运行并且能完成工作要求;
(2)自动上下料工业机器人最大工作范围为300cm,一轴回转角度范围为90度,最大夹取直径100mm,最大夹取重量为3kg,重复定位精度0.05mm。
(3)具有一定保护装置。

A0-电控柜接线图

A0-顺序功能图接线图

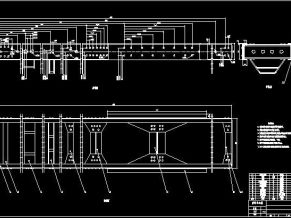
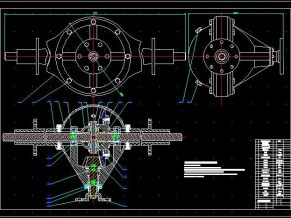
A0-自动上下料工业机器人装配图

A2-液压系统图