

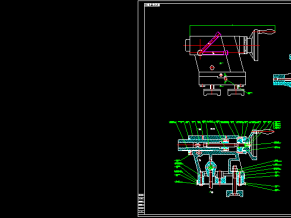
支座和手臂装配图
【含CAD全套】三自由度圆柱坐标型工业机器人设计
摘要
在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机器人等。而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。本设计为三自由度圆柱坐标型工业机器人,其工作方向为两个直线方向和一个旋转方向。在控制器的作用下,它执行将工件从一条流水线拿到另一条流水线这一简单的动作,本文是对整个设计工作较全面的介绍和总结。
目录
目录…………………………………………………………………………………………… 1
中文摘要……………………………………………………………………………………… 2
Abstract ……………………………………………………………………………………… 2
第1章绪论……………………………………………………………………………… 3
第2章工业机器人的总体设计…………………………………………………………… 3
2.1工业机器人的组成及各部分关系概述…………………………………………… 3
2.2工业机器人的设计分析……………………………………………………………… 4
2.2.1设计要求………………………………………………………………………… 5
2.2.2总体方案拟定…………………………………………………………………… 5
2.2.3工业机器人的主要技术参数………………………………………………… 5
第3章工业机器人的机械系统设计……………………………………………………… 6
3.1工业机器人的运动系统分析……………………………………………………… 6
3.1.1机器人的运动概述……………………………………………………………… 6
3.1.2机器人的运动过程分析……………………………………………………… 7
3.2工业机器人的执行机构设计……………………………………………………… 8
3.2.1末端执行机构设计……………………………………………………………… 8
3.2.2手臂机构设计………………………………………………………………… 11
3.2.3腰部和基座设计………………………………………………………………… 12
3.3工业机器人的机械传动装置设计……………………………………………… 18
3.3.1滚珠丝杠的选择………………………………………………………………… 18
3.3.2谐波齿轮的选择………………………………………………………………… 19
3.3.3联轴器的选择………………………………………………………………… 20
第4章工业机器人的计算机控制系统概述……………………………………………… 20
4.1工业机器人控制系统的特点及对控制功能的基本要求……………………… 21
4.2计算机控制系统的设计方案……………………………………………………… 22
4.3硬件电路的组成………………………………………………………………… 22
第5章工业机器人运行时应采取的安全措施…………………………………………… 22
5.1安全要求………………………………………………………………………… 22
5.2实施方法…………………………………………………………………………… 23
鸣谢……………………………………………………………………………………… 23
参考文献………………………………………………………………………………… 24

终端执行器

导向套

支架

支座

转动壳体
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!











")
机器人送料(四自由度)")
")
")
")


管道机器人含SOLIDWORKS三维图及CAD图纸说明书(含CAD图纸)")
单片机控制三自由度圆柱坐标机械手设计(含CAD图纸)")
