

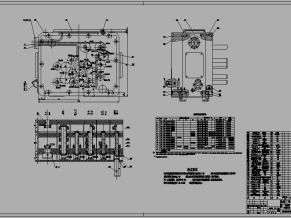
管道机器人设计原理图
(全套带图)管道机器人含SOLIDWORKS三维图及CAD图纸说明书(含全套CAD图纸)
摘要
此次设计通过运用合理的系统知识,全面阐述了管道布线机器人结构主体设计的全过程。分析了国内外管道机器人的发展现状并预测了其未来的发展趋势,结合分析了目前管道机器人常用的结构,提出了一个全新的管道布线机器人主体结构,即由两个履带式机器人主体通过压缩弹簧相连接,通过两个机器人相互配合有效通过T形管道及有转弯的管道,机器人由多个电机驱动并且机器人主体上利用了四杆机构,四杆机构在弹簧力的作用下运动,从而能更好的使履带轮贴紧管壁。估算出了机器人的总体质量、所需摩擦力和电机所需转矩,恰当地选用了电机和减速器。通过雅可比行列式及动力学参数得出履带轮地最佳直径,再根据执行机构的大小得出嵌入折叠式四杆机构中地压缩弹簧的参数。根据管道内的实际工作情况,选用CMOS摄像头模块。简要的介绍了Maya三位动画软件,并运用Maya进行仿真设计,模拟机器人在管道内行走的情况。通过仿真演示,证明了管道布线机器人的设计完全可以满足市场的需求,必定会有十分广阔的市场前景。
目录
绪论…………………………………………………………………………………1
1.设计流程图………………………………………………………………………3
2.设计的前期准备…………………………………………………………………4
2.1设计的基本要求……………………………………………………………1
2.2市场需求调查………………………………………………………………1
2.3设计参数的确定…………………………………………………………………1
2.4总体方案的选择…………………………………………………………………1
3.机器人总体质量估计和摩擦力计算……………………………………………1
3.1质量的初步估计…………………………………………………………………1
3.2摩擦力的计算…………………………………………………………………1
3.3计算电动机的转矩………………………………………………………………1
4.电机的选择及减速器的设计……………………………………………………1
4.1电机的选择…………………………………………………………………1
4.2减速器的设计…………………………………………………………………1
5.具体结构及其零件的功能与设计……………………………………………1
5.1原理设计…………………………………………………………………1
5.2结构设计…………………………………………………………………1
5.3弹簧的选择…………………………………………………………………1
5.4主要零件的设计…………………………………………………………………1
6.机械手的设计与控制……………………………………………………………1
6.1机械手简介…………………………………………………………………1
6.2伺服马达的选用…………………………………………………………………1
6.3对机械手的运动编写简单程序………………………………………………1
6.4机械手控制电路设计………………………………………………………1
7.摄像头的选用…………………………………………………………………1
8.三味零件造型设计……………………………………………………………1
8.1造型软件简介…………………………………………………………………1
8.2造型效果图…………………………………………………………………1
9.结论…………………………………………………………………1
9.1设计的完成情况…………………………………………………………………1
9.2设计的不足…………………………………………………………………1
9.3应用前景…………………………………………………………………1
附录
1.外文文献
2.外文文献译文

管道机器人 移动部分

管道机器人设计伸缩机构和机身设计图

管道机器人设计伸缩机构和机身设计图

管道机器人设计装配12

















超高压巡线除冰机器人(含CAD图纸)")
")
")
")
机器人五自由度机器人结构设计机械毕优秀设计齐全")
机器人焊接机器人机械毕优秀设计齐全")

机器人多用途气动机器人结构设计机械毕优秀设计齐全")