

装配图18
康复机器人的系统设计全套齐全(含全套CAD图纸)
摘要
康复机器人技术则是近年来迅速发展的一门新兴机器人技术,是机器人技术在医学领域的新应用;目前康复机器人已成为国际社会研究的热点之一。本课题主要研究的基于姿态控制步态康复训练系统的设计。
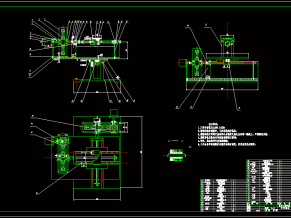
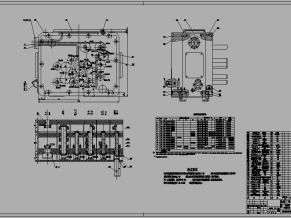
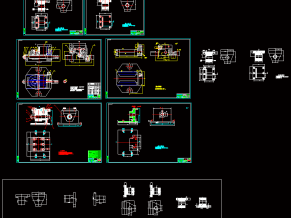
本文介绍了下肢康复机器人国内外发展现状和应用情况,进行了步态训练机器人的总体方案设计、结构设计,和总体控制方案设计等;对步态训练机器人进行三维建模,并对重要零件进行校核。本步态训练机器人共有7个自由度,其中每一条机械腿上有3个关节(3个自由度)模仿人体腿上的踝关节、膝关节、髋关节和一个用于减重的减重系统(包括1个自由度)。此系统能用于脑损伤、中风等病人的步态康复训练,帮助病人更好地进行康复训练,减轻他人的帮助,挺高效果。
目录
第1章绪论1
1.1概述1
1.2康复机器人的国内外研究现状2
1.3本课题主要研究内容7
第2章总体方案设计与选择的论证8
2.1步态分析8
2.2方案的选择11
2.2.1自由度的设计13
2.2.2基本参数的选取13
2.2.3驱动器的选择14
2.2.4关节结构的选择14
2.2.5连杆结构的选择14
2.2.6腰部结构设计15
2.2.7减重机构15
2.2.8整体结构设计16
2.3本章总结16
第3章机械结构的设计与计算及驱动元件选型17
3.1人体参数17
3.2各关节运动学分析17
3.2.1踝关节的运动学分析18
3.2.2膝关节的运动学分析18
3.2.3髋关节的运动学分析19
3.3关节力矩分析20
3.4具体结构设计21
3.4.1关节结构的选择21
3.4.2连杆结构的选择22
3.4.3腰部结构设计23
3.4.4减重机构23
3.4.5整体结构设计24
3.5一些零件的设计和校核25
3.5.1轴承的选择及校核25
3.5.2气缸的选择25
3.5.3连杆的计算与校核27
3.5.4销轴的校核29
3.5.5双头螺柱的校核30
3.5.6传感器的选取30
3.6减重系统分析及相关计算31
3.7本章小结32
第4章供气与控制系统的设计33
4.1供气系统的设计33
4.1.1供气回路设计33
4.1.2气动元件的选择34
4.2康复机器人的训练方式39
4.3气动自动控制方框图39
4.4本章小结40
结论41
参考文献42
致谢45

背板

背板上杆

背板下杆

架子1

零件图A0-11

零件图A0-21
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!














")
")
")
")
")
")
")
")
")