

程序框图
(含CAD图)机器人五自由度机器人结构设计机械毕优秀设计全套齐全
摘要
随着机器人技术的飞速发展,工业机器人的应用领域正在不断的扩大,对教育培训部门提出了新的要求,为提高机器人教学的水平,我们研制了一套以实验教学为目的的机器人演示系统。
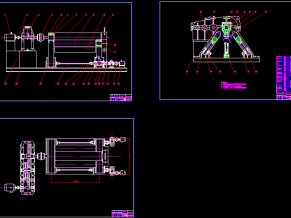
本文阐述了机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体的机器人设计要求,进行了本演示系统的总体方案设计和各自由度具体结构设计、计算;对演示系统的控制部分的研制,其中包括:进电机开环控制;光电码盘为反馈元件的,以PWM型功放电路为驱动器的直流电机闭环控制;以89C51单片机为核心,实现演示系统的键盘管理和LCD显示,并以单CPU分时控制形式,实现机器人运动的点位控制方式。
最后设计制定出利用本演示系统所开设的几个实验的指导书。
目录
摘要1
Abstract 2
第1章绪论1
1.1机器人概述1
1.1.1机器人的诞生与发展1
1.1.2国内发展状况2
1.1.3国外机器人发展趋势3
1.2机器人产业对教育、培训的要求及本课题的提出3
第2章总体设计方案5
2.1总体设计的思路5
2.2总体方案的确定5
2.2.1坐标形式的选择6
2.2.2驱动系统的类型选择6
2.2.3各部位传动机构的确定6
2.2.4外形尺寸和运动范围的确定7
2.2.5控制系统的确定7
第3章结构设计及计算9
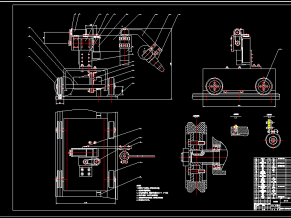
3.1手部夹持器的结构设计9
3.1.1概述9
3.1.2手部的结构和手指形状的确定9
3.1.3手部驱动力的计算和电机的选择10
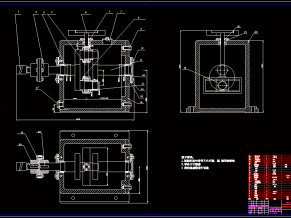
3.2腕部结构设计13
3.2.1概述13
3.2.2腕部结构设计14
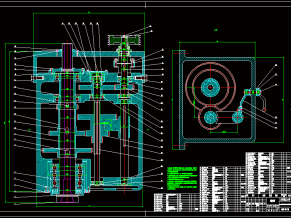
3.3臂部及机身(底座)的设计计算18
3.3.1概述18
3.3.2结构设计计算19
第4章控制系统设计25
4.1控制系统方案的确定25
4.1.1控制方案的确定25
4.1.2驱动方式的确定25
4.1.3控制系统类型的确定25
4.1.4步进电机控制方式的确定26
4.1.5直流电机控制方式的确定26
4.1.6键盘及显示方式的确定26
4.2演示系统的组成26
4.3驱动电路的研制29
4.3.1恒流源型步进电机驱动电路的研制29
4.3.2双极型PWM直流力矩电机的驱动电路的研制31
4.3.3光电码盘的选择和辩向电路的研制, 33
4.3.4直流电机的闭环控制系统的研制。 36
4.3.5以单片机为核心的机器人控制系统的研制36
第5章技术经济分析46
第6章教学机器人演示系统演示实验的设计47
6.1实验一教学机器人演示系统的组成及结构47
6.2实验二:教学机器人控制系统的演示实验48
结论50
专题部分:旋转电机的分类及其总结51
致谢61
参考文献62
附录1 63
附录2 70
附录3 75

蜗轮蜗杆减速器
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!













")
")
")
输电线路除冰机器人除冰机构设计(含cad图纸)")
")
")
")
齐全(含CAD图纸)")
")
")