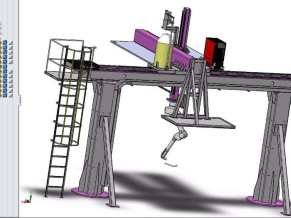
手部及腕部
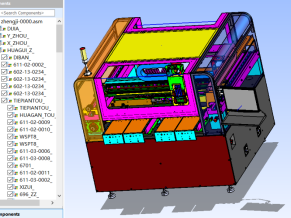
本文简要介绍了工业机械手的概念,机械手的组成和分类,机械手的自由度和坐标形式,及国内外的发展状况。 本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,并且对机械手的手腕结构、手臂伸缩机构、手臂回转机构、手臂升降机构,分别进行了计算和设计,对一些部件的强度进行了校核。 同时,本文设计出了机械手的液动系统,选择了适用的液压元件,绘制了机械手液压系统工作原理图。
缸体
回转及升降机构
任务书
伸缩机构
说明书
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:










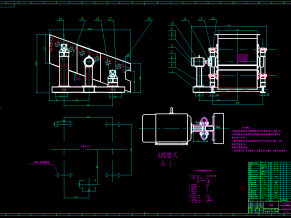















设计CAD图纸")




