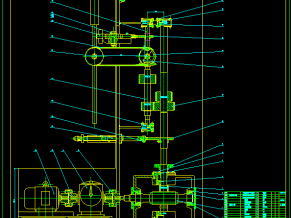
0森林灭火机器人总装图
摘要
本文通过对森林灭火机器人应用场合的研究分析,确定了总体方案为履带式森林灭火机器人。将机器人划分为灭火、行走、和控制系统三个组成部分,从灭火装置、底盘结构、再到动力传递等方面对机器人进行了详细的结构设计和理论计算。通过CAD和Solidworks等绘图软件对相关部分进行了工程制图设计,包括灭火装置、整体机架、履带式底盘等;通过选择合适的硬件,结合灭火机器人的工作原理,编写了应用软件程序,从而完成控制系统的搭建,实现对灭火机器人的远程控制。
面对森林的恶劣环境,人工灭火非常困难。为了保障消防人员的生命安全,就需采用特定的机器人在特定的场合完成任务。因此,研究应对于森林火灾的灭火机器人对社会有着深远的影响。
关键词:森林;灭火机器人;履带式;控制系统
ABSTRACT
In this paper, through the research and analysis of forest fire extinguishing robot application occasions, the overall scheme is determined as a crawler forest fire extinguishing robot. The forest fire extinguishing robot is divided into three components: walking, fire extinguishing and control system. From the aspects of chassis structure, fire extinguishing device, power transmission, etc., the robot has been designed and calculated in detail. Through CAD, SolidWorks and other drawing software, the relevant parts of the engineering drawing design, including the fire- fighting device, the overall frame, crawler chassis, etc. By selecting appropriate hardware and combining with the working principle of the fire extinguishing robot, so as to complete the construction of the control system and realize the remote control of the fire-fighting robot.
Faced with the harsh environment of the forest, manual fire extinguishing is very difficult. In order to protect the life safety of firefighters, it is necessary to use specific robots to complete tasks on specific occasions. Therefore, research should have a far-reaching impact on forest firefighting robots.
Keywords: forest; fire extinguishing robot; tracked chassis; control system
目录
第一章绪论1
1.1课题研究背景及意义1
1.2国内外森林灭火机器人发展现状1
1.2.1国内森林灭火机器人发展现状1
1.2.2国外森林灭火机器人发展现状2
1.3本课题研究内容2
第二章森林灭火机器人总体方案设计4
2.1总体方案设计4
2.1.1行走方式的选择5
2.1.2灭火剂的选择5
2.1.3驱动方式的选择5
2.1.4控制系统的选择5
第三章森林灭火机器人的机械部分设计6
3.1底盘系统设计6
3.1.1履带行走装置设计6
3.1.2轮系装置设计6
3.1.3箱体设计8
3.2森林灭火机器人喷水装置设计8
3.2.1喷水效果的主要影响因素9
3.2.2基本参数确定9
3.2.3压力损失计算9
3.3电机功率的校核13
3.3.1电机驱动功率的计算13
3.4机械部分传动设计17
第四章森林灭火机器人行走装置运动分析18
4.1直线运动分析18
4.2森林灭火机器人爬坡运动分析20
4.2.1纵向斜坡运动分析20
4.2.2横向斜坡运动分析23
第五章森林灭火机器人控制部分设计24
5.1控制系统结构框图24
5.1.1电池模块24
5.1.2控制模块24
5.1.3电机驱动模块25
5.1.4灭火喷水模块25
5.2森林灭火机器人电气原理图25
5.2.1控制系统总电路图25
5.2.2无线通信模块原理图26
5.2.3灭火喷水模块原理图26
5.2.4电机驱动模块原理图26
5.2.5速度模块原理图27
5.3森林灭火机器人程序流程图27
5.3.1主程序流程图27
5.3.2避障程序流程图28
5.3.3灭火程序流程图28
结束语29
致谢30
参考文献31
第一章绪论
1.1课题研究背景及意义
近些年来,人们户外运动的数量不断增多,导致每年发生的森林火灾也急剧上升。由于森林地形复杂,树木茂盛,可燃物多且场所较大,火灾事故一旦发生,将给森林消防员救援带来极大的难度。想要在森林这样的环境下完成救援任务,就必须具备特定的救援设备,否则不但完成不了灭火救援任务,可能还会造成重大的经济损失以及重大的人员伤亡。因此,森林灭火机器人具有的性能将在灭火救灾中起到重要作用。
随着科技结合多元化的发展,森林灭火机器人在不断更新完善,最大限度地

大齿轮

低速轴

驱动轮
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!