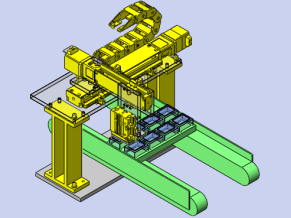
总装轴测图
目的动作 将搬运来的工件用本装置交接,缩短各轴之间的往返距离,通过每单一时间的搬送量增加从而缩短工作周期时间的结构 环境操作性 工件在一定周期一个个被搬运过来 下一个工序周期时间早,本装置作为缓冲使用 单轴机器人一定在下端待机
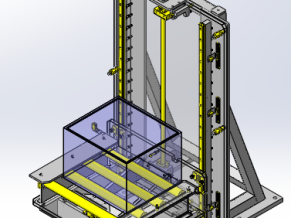
总装侧视图
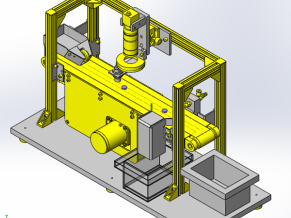
总装正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: