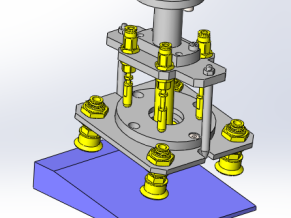
轴测图
目的动作 通过使用了压缩弹簧的缓冲机构,提高与工件的贴合性 吸附机械手的安装面带有角度,防止墙壁附近的接触等 环境操作性 作业人员装入放有工件的托盘后,机器人前来取工件 达到弹簧的设定压缩量时,光电传感器感知到这一情况
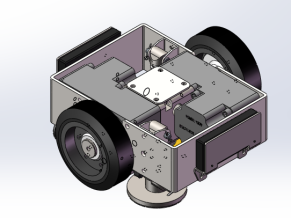
侧视图
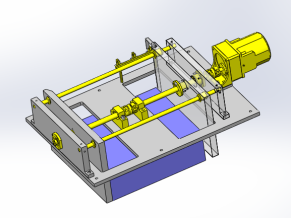
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: