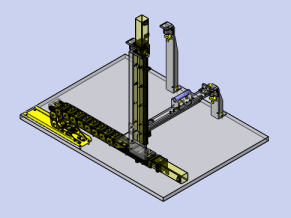
轴测图
目的动作 通过齿条&齿轮式平行机械手对施加负载的工件进行定心。 2组机械手带有独自的驱动源,可各自独立地进行动作。 (工件分别通过机器人供给/排出到滑台上) 环境操作性 由于1组机械手只需单侧驱动,故易于投放工件。
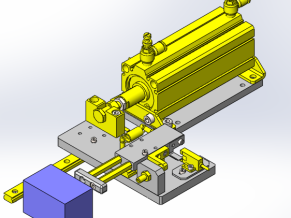
侧视图
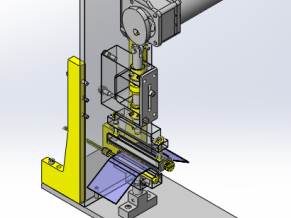
正视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:






















")




