龙门桁架机器人
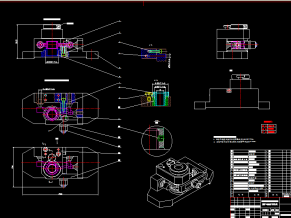
本模型为龙门桁架机器人设计方案,主要结构为通过钢结构焊接立柱架高的X、Y、Z三个方向的水平轴,Z轴采用滑枕式2节可伸缩驱动方式,伺服电机驱控。在Z轴末端搭载安装六轴工业机器人,用来增加机器人工作范围。本模型为sw2022和x-t通用格式,可供大家参考!
横移机构
伸缩臂
龙门桁架机器人局部图
龙门桁架机器人主视图
龙门桁架机器人左视图
龙门桁架机器人俯视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:
























――sw2022版本,另含x-t通用格式")

――sw2022版本,另含x-t通用格式")
转子绕线机(量产设备)――SW2022版本,另含x-t通用格式")
齿轮输送机构――SW2022版本,另含x-t通用格式")


――sw2022版本,另含x-t通用格式")

――sw2021版本,另含x-t格式")