����
������ץ�֣�ģ��Ϊһ���еץ�֣�ͨ�����������������������ֺ����˻�����ʵ�ּ�ץ���ſ��ͱպϣ���ɹ����ļ�ȡ���ͷŶ�����������ʹ���ڻ�е���ϣ�ʵ��ģ���˹�ץȡ������ͼֽ���ı༩������������ֱ��ʹ�ã����߸�����Ҫ�ġ����нϸߵIJο���ʵ�ü�ֵ��

�н�״̬

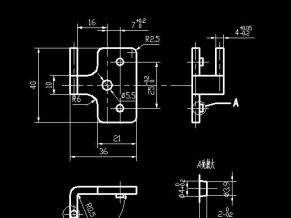
����ͼ

���ͼ

װ��ͼ
���������������û��ϴ�������Ȩ��ԭ�������У����漰��Ȩ���⣬����������ϵ�����ǽ���ʱ������