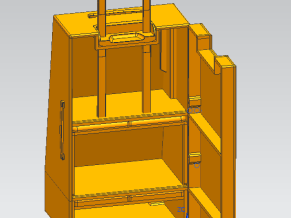
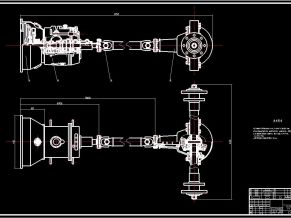
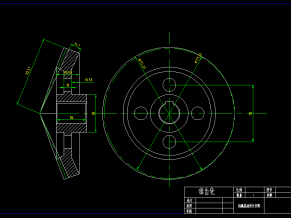
在传统探测车的基础上,对机械臂、轮胎传动以及整体构造进行改进。仿人机械臂,与传统的机械臂相比灵活度大大提高。采用液压杆传动,每个关键部位还 装有独立电机,增加灵活性与稳定性。采用十二驱独立传动,增大受力面积,适应于火星坑洼崎岖地面。行驶方向由速度方向机(步进电机)控制。
轮子4
轮子组11
手10
手14
速度方向机4
速度方向机5
整体6
整体7
整体10
整体11
组合轮子16
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: