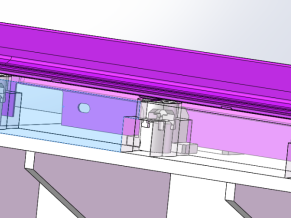
外观
总装配文件:\Workspaces\Workspace\zz1.iam
本设备在保证高效运行的同时,结合同类产品的优点,增加了对不同环境的适应度,大大提高了性能。履带轮可以在复杂路面行进;差速器的使用可以节约电机数量,减少成本;采用关节型结构,使机器人动作灵活,结构紧凑,占地面积小;并联式机械手臂保证运动的高精度;可更换机械抓手有真空吸附式和外夹式两种模式,既可以用于箱式物件也可以抓取袋状包装;采用电机驱动控制反应更灵敏,可实现高速、高精度的连续轨迹控制。

底部

后部

机械抓取

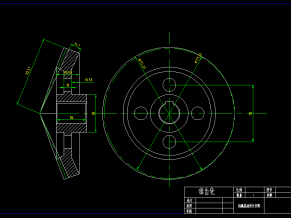
结构

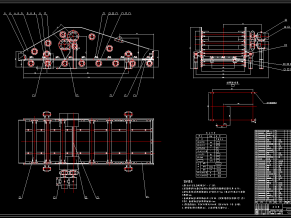
行走机构

真空吸附吸盘