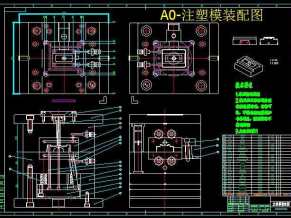
A0-机械手装配图
本文在论述了工业机器人发展的国内外研究现状的基础上,阐述了摆转运动机构总体设计方案。在理论上对摆转运动机构的主要结构和零件--电机、齿轮、轴承等进行了详细的计算说明,满足了实际需要。设计中主要提高了摆转运动机构的精度和稳定性,对各零件和机构进行了合理的选择,使之能够和整个摆转运动机构有效的组合起来,从而完成一种工业机器人摆转运动机构的设计。

A0-小臂框图

A2-大锥齿轮

A3-齿轮轴(圆锥)

A3-齿轮轴(直齿)

A3-大臂小臂连接轴

A3-大小臂驱动齿轮

A3-压块

A3-圆柱齿轮

A3-轴承壳

A3-轴承壳盖

目录二

目录一

字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!